近日,智能车辆团队论文《Reconstructing Model Accuracy and Complexity: A Novel Vehicle Dynamics-Based Approach for Sideslip Angle Estimation》在IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY在线发表。
车辆质心侧偏角是智能车辆操纵稳定性控制系统的核心状态参数,直接决定主动安全控制的决策与执行效果。由于高精度测量传感器成本高昂,量产车辆无法直接测量该参数,基于车辆动力学模型的估计算法因此成为工业界和学术界的研究重点。
然而,车辆横向动力学系统具有纵向车速时变、大转向工况下轮胎力学非线性饱和的固有特性,整体呈现强耦合、时变、非线性的复杂特征,现有基于动力学模型的质心侧偏角估计方法主要分为经典单轨模型、依赖不可测状态的非线性建模以及纯数据驱动三类思路,普遍存在假设与实际工况不符、观测器设计复杂、工程落地难度大、依赖海量训练数据、泛化性不足等技术问题,容易引发模型失配、估计误差大幅上升,难以适应轮胎非线性饱和、车速大幅变化的复杂驾驶工况,其核心难点在于车速时变与轮胎非线性的双重耦合特性,使得车辆横向动力学模型难以同时实现全工况精准表征与低复杂度结构设计,且对不可测状态的依赖进一步加剧了建模与估计的技术难度。
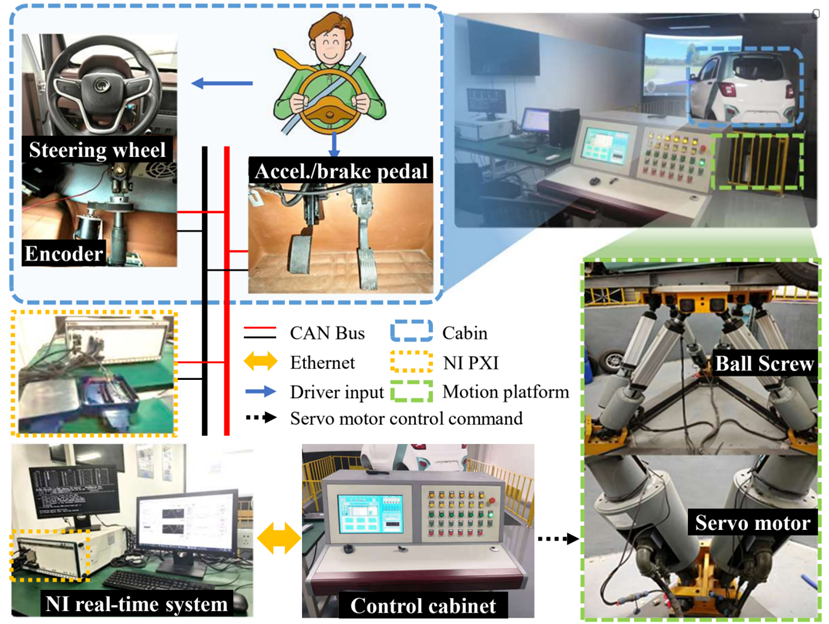
针对上述问题,不同于现有基于恒定车速假设或依赖不可测轮胎侧偏角的建模思路,本研究的创新思路在于挖掘可测车辆状态与轮胎非线性特性的内在强关联,融合T-S模糊建模与线性参变理论,将车速时变与轮胎非线性的双重耦合建模问题转化为可测参数驱动的多模型融合建模问题,从而解决模型精度与复杂度难以平衡的核心问题。具体地,研究了车辆动态响应与轮胎力学特性的关联过程,基于驾驶员在环测试平台采集的高保真数据,分析了可测车辆状态与轮胎侧向力的统计相关性,发现了侧向加速度与前后轴轮胎侧向力存在极强正相关的现象;引入T-S模糊建模思想,以可测侧向加速度为模糊规则前件变量,提出了基于可测状态的T-S模糊轮胎模型;融合线性参变理论,通过多胞体几何表示处理时变纵向速度,构建了增强型车辆横向动力学建模框架;基于参数依赖Lyapunov函数,推导了观测器设计的充分条件,设计了具有H∞性能的侧偏角观测器;开展了驾驶员在环综合驾驶场景测试,完成了模型参数辨识与观测器性能验证。
驾驶员在环测试结果表明,相较于基于线性轮胎模型、传统优化辨识刚度的对比方法,所提方法消除了对不可测状态的依赖,显著降低了观测器的设计与实现复杂度;在轮胎非线性饱和、车速30-80km/h大幅变化的工况下,侧偏角估计均方根误差降低50%-77%,最大绝对误差降低59%-77%;即使在侧向加速度0.7g-0.8g的高极限工况下,仍能保持稳定的估计性能,有效解决了传统方法在复杂工况下估计精度不足、鲁棒性差的问题。
本研究从可测车辆状态与轮胎非线性特性关联的新视角,发现了侧向加速度与轮胎侧向力的强统计相关现象,揭示了车辆横向动力学响应与轮胎力学特性的内在耦合机制,阐明了侧向加速度作为轮胎非线性表征核心可测参数的作用;提出了融合T-S模糊与线性参变理论的增强型车辆横向动力学建模方法,构建了基于可测参数的H∞侧偏角观测器设计策略,发展了车辆时变非线性动力学系统的建模与状态估计理论;所提方法兼具精度与工程可实现性,可为智能车辆横向状态高精度估计、操纵稳定性控制系统研发提供理论支撑与技术参考。
论文作者:张立钦;胡满江;王宇克;汤清淞;潘济安;边有钢
论文链接:https://ieeexplore.ieee.org/document/11373403


