近日,智能车辆团队论文《Velocity-Integral-Constraint-Based In-Motion Initial Alignment for Kalman Filter-Aided Low-Cost SINS》在IEEE Transactions on Instrumentation and Measurement发表。
1 文章摘要
初始对准作为水下组合导航系统正常工作的前提,其对准的速度和精度对于导航系统性能至关重要。水下载具的弱机动特性与低成本MEMS-IMU的较大器件偏差是影响动态对准效果的关键因素。为提高低成本组合导航系统在弱机动条件下的动态对准性能,本文提出了一种新的基于速度积分约束的卡尔曼滤波辅助优化对准方法。通过利用速度积分空间约束关系构建观测,避免了因机动不足所造成的加速度观测失效问题,为弱机动场景的动态对准问题提供了有效解决方案。同时,本文基于卡尔曼滤波技术设计了能够联合估计IMU零偏、载体坐标系姿态误差的闭环修正策略,进一步提高了动态对准求解模型中观测量构建精度。经仿真及现场试验表明,对于弱机动条件下低成本组合导航系统的动态对准,所提出的方法相比于最先进的方法具有快速、精确的优势。
2 主要贡献
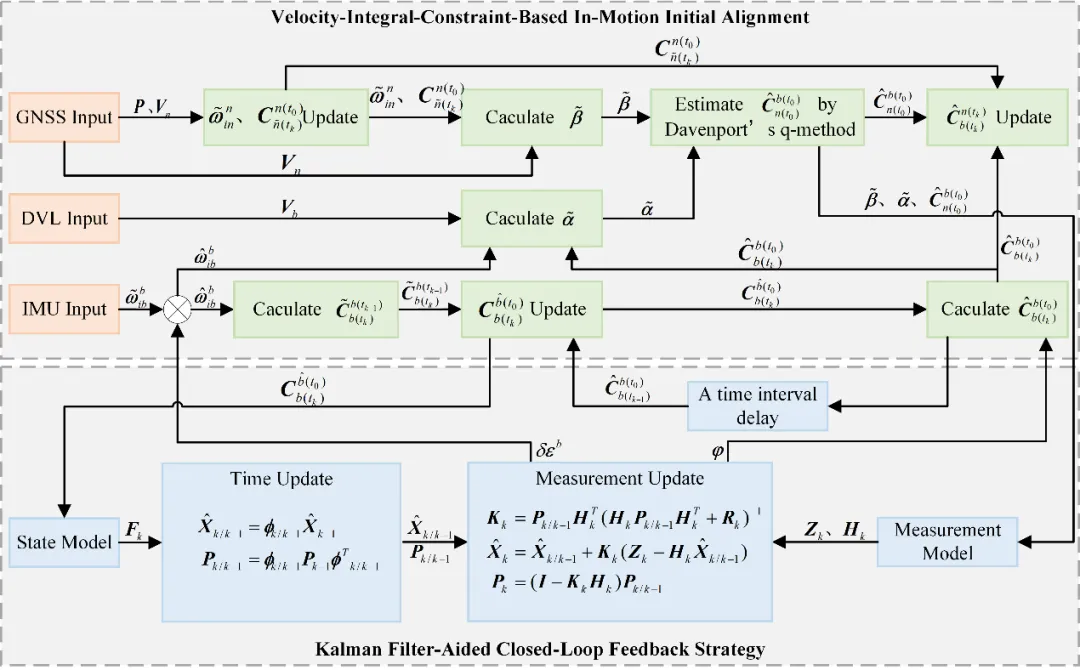
1) 针对弱机动条件影响基于比力方程的传统OBIA方法有效性问题,提出了一种基于速度积分约束的OBIA方法,该方法不再使用加速度信息构建观测,取而代之的是利用GNSS与DVL速度积分量的空间转换关系构建观测,从而避免了观测奇异问题对对准精度的负面影响。
2) 为避免低成本MEMS-IMU误差影响对准精度及收敛速率的问题,提出了一种卡尔曼滤波辅助的闭环修正方法。该方法在基于速度积分约束的OBIA基础上,构建了陀螺偏差与载体坐标系姿态误差的线性状态空间模型,通过卡尔曼滤波实时估计相关误差并进行闭环反馈修正,提高了所构建观测量准确性。
3) 分别通过仿真和现场试验对比所提出方法与现有的最优对准方法的性能。结果表明,本文所提出的方法在低动态场景下展现出强大的优势,能够以更快的速度实现更高精度的IMIA。
3 论文作者
曹世鹏、边有钢、王广才、秦洪懋、胡满江、崔庆佳、丁荣军
4 论文链接
https://ieeexplore.ieee.org/document/10945952


