近日,智能车辆团队论文《A Stable RTK/MEMS-IMU Tightly-Coupled Algorithm under Differential Corrections Outage》在IEEE Transactions on Vehicular Technology发表。
1 文章摘要
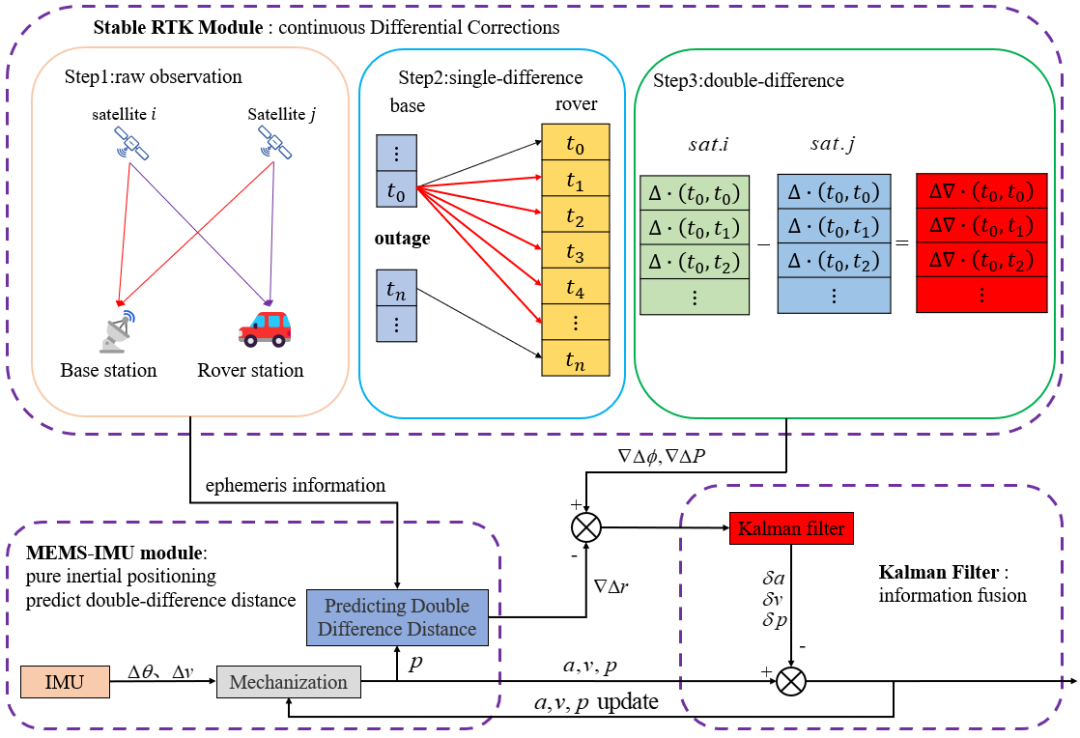
GNSS-RTK和MEMS-IMU结合的组合导航系统是户外常用的高精度、低成本定位方案。然而,MEMS-IMU的显著测量误差会迅速导致基于惯性误差传播模型的导航状态预测发散。为了克服这一限制并提高准确性,保持RTK测量信息的连续性至关重要。然而,由于无线传输链路不稳定、通信设备可靠性不足或基站观测数据丢失等原因,差分校正信号经常出现中断,导致测量信息质量下降,进而影响组合导航系统的精度。因此,本文提出了一种稳定的RTK/MEMS-IMU紧耦合算法。在差分校正中断期间,该算法利用基站的历史差分校正以及实时流动站信息来构建稳定的双差载波相位矢量。这种方法保证了测量信息的稳定性,提高了定位精度。仿真结果验证了该方法的有效性。同时陆地试验结果表明,与传统的RTK/MEMS-IMU紧耦合算法相比,该算法在差分校正中断期间的位置精度和速度精度分别有29.5%和18.4%的提升。
2 主要贡献
1) 提出了一种改进的稳定RTK/MEMS-IMU紧耦合算法。该算法能够抵抗差分校正中断对系统精度的影响,具有更好的稳定性。
2) 推导了改进的稳定RTK/MEMS-IMU紧耦合算法的状态方程和测量模型,并详细设计了稳定载波相位差观测值的构建方法。
3) 通过仿真和实地测试验证了所提算法的有效性。结果表明,与现有高精度算法相比,该算法能够实现更准确的定位结果,并表现出更高的系统稳定性。
3 论文作者
边有钢、曹世鹏、王广才、秦晓辉、胡满江、秦洪懋
4 论文链接
https://ieeexplore.ieee.org/document/10936643


