近日,智能车辆团队论文《SREDFTC: A Safe, Robust and Efficient Distributed Formation Tracking Controller for Nonlinear Multi-UUV Systems》在Nonlinear Dynamics发表。
1 文章摘要
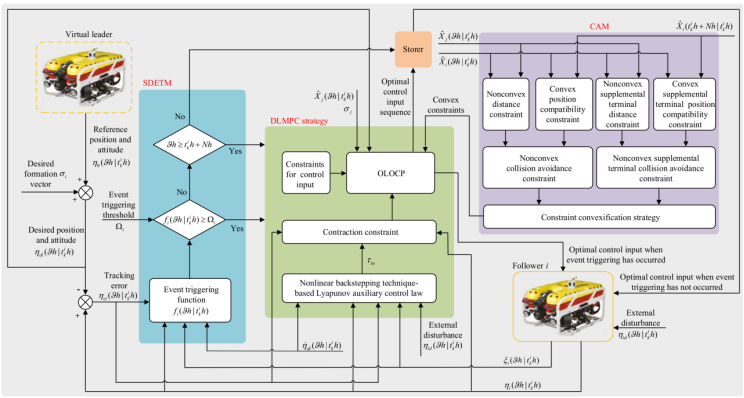
为了提高由多个非线性无人水下航行器组成的系统在外部干扰下的跟踪精度、安全性、鲁棒性和效率,提出了一种名为SREDFTC的分布式编队跟踪控制器,该控制器将基于采样数据的事件触发机制、避碰方法和基于分布式李雅普诺夫模型预测控制策略相结合。首先,设计了一种基于采样数据的事件触发机制,并采用了一种新开发的触发规则。同时,提出了一种新的避碰方法,包括避碰约束、补充终端避碰约束和约束凸化策略。此外,根据一种新颖的基于非线性反步法技术的李雅普诺夫辅助控制律,并考虑外部干扰,建立了一个创新的收缩约束,将其引入在线局部最优控制问题中,从而形成基于分布式李雅普诺夫模型预测控制策略。此外,还对系统的递归可行性和闭环稳定性进行了严格的分析。最后,通过大量的对比仿真,证明了SREDFTC的有效性和优越性。
2 主要贡献
1) 通过将 SDETM、CAM 和 DLMPC 策略相结合,为三维空间中的多无人水下航行器(UUV)系统提出了一种新的分布式编队跟踪控制器,称为 SREDFTC。据我们所知,这是首个同时考虑高跟踪精度、鲁棒性、安全性和效率的编队跟踪控制器。
2) 设计了一种新的 SDETM,以减少属于 DLMPC 策略的 OLCP 的优化次数,降低 UUV 之间的数据传输次数,并避免因扰许多其他的 Zeno 现象。
3) 提出了一种新颖的 CAM,其中碰撞规避约束确保了系统的安全性,补充的终端碰撞规避约束解决了由于碰撞规避约束而导致难以保证 OLCP 递归可行性的问题,而约束凸化策略将这两个约束转化为作为其充分条件的凸约束,从而使 OLCP 成为一个凸优化问题,并降低了 OLCP 的计算复杂度。
4) 根据一种新颖的基于非线性反步技术的李雅普诺夫辅助控制律,为 DLMPC 策略建立了一个创新的收缩约束条件,该条件考虑了外部干扰,能够使多无人水下航行器系统渐近稳定,从而避免了设计干扰补偿机制的需要,使 SREDFTC 能够继承李雅普诺夫辅助控制律的稳定性和鲁棒性,并在李雅普诺夫辅助控制律的可行解范围内找到最优控制输入。
3 论文作者
龙承启、胡满江、边有钢、常灯祥
4 论文链接
https://link.springer.com/article/10.1007/s11071-025-11295-w


