近日,智能车辆团队论文《Learnable Operational Design Condition Monitor for Failure Prediction in Autonomous Driving》在Accident Analysis & Prevention发表。
1 文章摘要
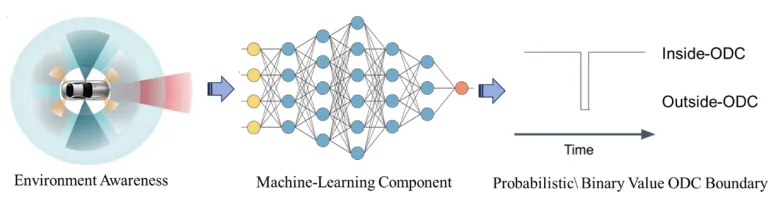
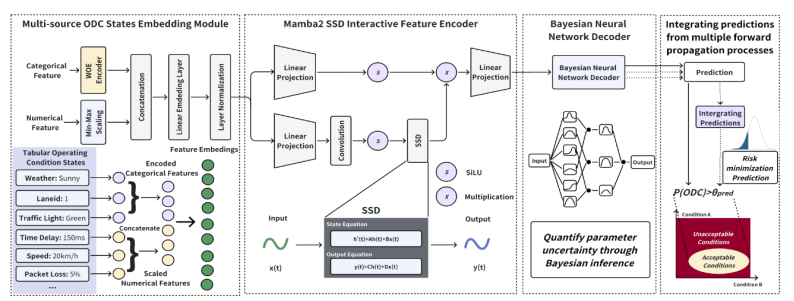
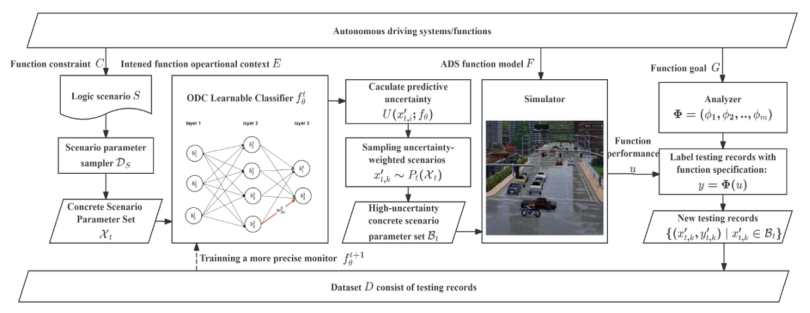
自动驾驶汽车事故往往源于对运行设计条件(ODC)的违反——ODC是预先定义的车辆状态、环境因素和驾驶员能力的运行限制。ODC违反意味着在当前运行场景下,功能故障极有可能即将发生,而故障指的是系统无法达到指定的性能阈值或维持安全关键约束。因此,在系统运行过程中设计并持续监控ODC的边界状态,是防止系统故障、确保运行安全并减少自动驾驶汽车事故的关键要务。然而,现有的ODC监控方法主要依赖一阶逻辑检查表,无法捕捉参数交互所产生的突发风险。为此,本文构建了一个端到端的方法框架,用于构建名为ODCNet的可学习ODC监控器,以实现故障预测。该架构首先将运行状态投影到统一的潜在表示中,然后通过神经推理得出概率边界估计,最后通过混合高斯过程回归校准残差。此外,一种自适应主动学习机制通过对高不确定性场景的针对性测试,持续提高边界精度。通过交叉路口、车道保持和车辆检测案例研究进行的验证,证明了该ODC监控器在事故发生前的故障预测性能。
2 主要贡献
1) 提出了一个利用机器学习模型来学习隐含ODC边界的完整框架,并设计了一种闭环主动学习策略,借助自动驾驶系统(ADS)的测试记录来持续优化ODC监控器。
2) 提出了ODCNet作为一种适用于多源ODC状态的高效监控模型。实验结果表明,与现有的表格分类器相比,该模型具有更优异的分类性能。
3) 开发了一种残差分析方法,通过对残差采用线性判别分析来校准预测结果,从而实现更稳健、更准确的预测。
3 论文作者
许皓玮、边有钢、李洋、秦洪懋、周汉楚、常方容、王少飞、叶青
4 论文链接
https://doi.org/10.1016/j.aap.2025.108139
---


