近日,智能车辆团队论文《Transmission-Efficient Fault-Tolerant Control for Intelligent and Connected Vehicles With Input Quantization and Event-Triggered Mechanism》在IEEE Transactions on Intelligent Transportation Systems发表。
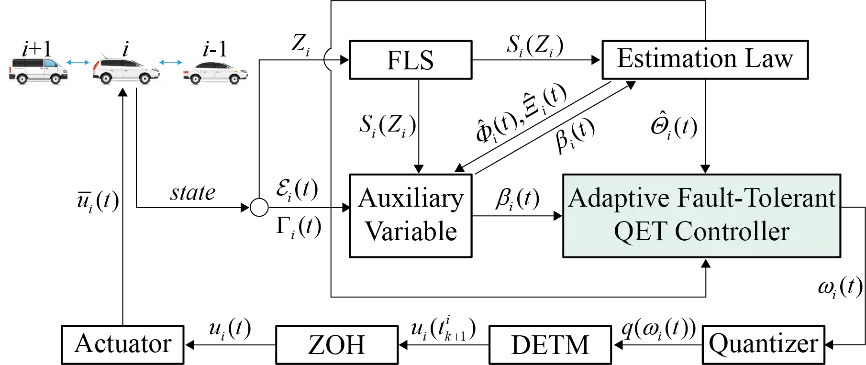
在信号传输带宽受限和执行器故障的背景下,智能网联车辆的控制器设计面临一定的挑战。为解决这些问题,本文提出了一种信号传输高效的容错控制策略。针对传统容错控制策略对故障先验信息的依赖,设计了自适应律用于在线估计未知故障特性的边界,从而增强系统的自适应能力。为提高控制器与执行器之间的通信效率,本文构建了一种融合迟滞量化与动态事件触发的量化事件触发机制。通过合理设计事件触发机制中的动态变量,有效避免了芝诺现象的发生。此外,借助光滑函数,设计了一种自适应控制器,以应对未知执行器故障及量化事件触发机制引入的信号偏差。仿真结果表明,在典型工况和真实驾驶场景下,所提策略不仅显著降低了通信负担,也具备良好的故障鲁棒性和控制性能。
-
提出了一种无需依赖故障先验信息的自适应容错控制方法,通过设计自适应律在线估计未知故障特性的边界,并结合光滑函数设计控制律,有效应对执行器故障的影响。此外,该方法避免在控制输入中引入不连续项,从而消除了抖振现象,提升了方法在实际应用中的可行性。
-
构建了一种融合迟滞量化与动态事件触发的量化事件触发机制,在显著降低通信负担的同时,增强了系统对量化信号变化的适应能力。此外,通过合理设计事件触发机制中的动态变量,有效避免了芝诺现象的发生。
-
在容错控制律中引入了基于执行器接收信号与原始控制信号关系设计的补偿项,用于修正由量化事件触发机制引起的信号偏差,从而进一步提升了系统的控制精度与整体性能。
董昊阳、李洋、王璐、王旭东、秦洪懋、万海英、边有钢、李永福


