近日,智能车辆团队论文《String stability under general topologies for CAVs: A coupled sliding surface-based distributed TMPC approach》在Transportation Research Part E Logistics and Transportation Review发表。
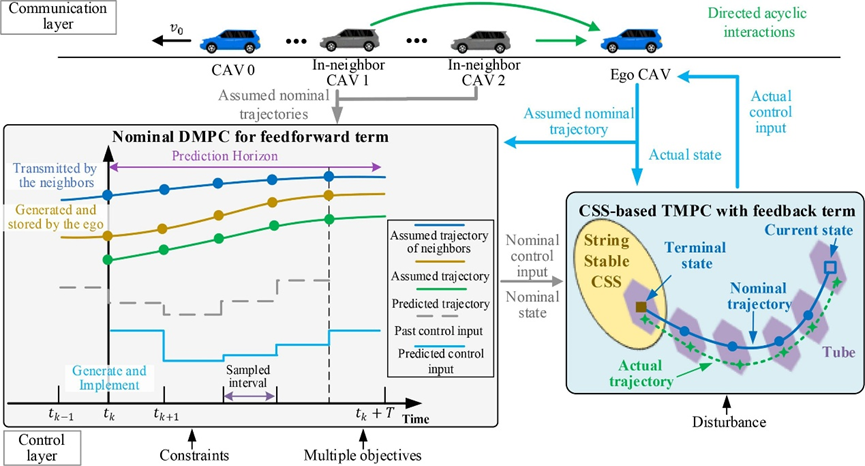
智能网联车辆(CAV)是智能交通系统(ITS)的重要组成部分,用于解决交通事故和拥堵问题,提高燃油经济性。在一般拓扑结构下,如何保证协同控制的队列稳定性仍然是一个尚未解决的问题。该研究提出了一种基于分布式管模型预测控制(TMPC)方法,通过引入队列稳定耦合滑模面(CSS)作为终端,在一般拓扑下实现了CAV的队列稳定协同控制。与现有的队列稳定方法相比,此方法约束更少,应用拓扑范围更广。具体地,通过设计代价函数、终端约束和终端假设控制输入将队列稳定CSS与TMPC结合,并从理论上证明了该方法的可行性、闭环稳定性和队列稳定性。仿真结果表明,该控制器在跟踪性能和鲁棒性方面优于现有的分布式模型预测控制(DMPC)和TMPC方法。
本文主要贡献如下:
1)在一般拓扑下保证队列稳定性仍然是一个未解决的挑战。本文通过设计一种新的CSS来填补这一空白,该CSS可以应用到现有的基于耦合滑模控制(CSMC)的方法中,并且可以融入到基于DMPC的方法中,以提高通信拓扑的适应性。
2)提出了一种基于CSS的TMPC控制器,将队列稳定CSS作为终端,用于有向无环拓扑下的CAV协同控制。从理论上证明了该方法的可行性、闭环稳定性和弦线稳定性。与现有的基于DMPC的队列稳定控制器相比,该方法不依赖于额外的约束或特定的成本函数,因此限制较少,适合更一般的拓扑。
3)该方法将传统的滚动时域滑模控制(RHSC)从单体控制扩展到分布式协同控制,解决了稳定性分析挑战,完善了RHSC理论。与传统的RHSC相比,DMPC的代价函数包含了多个目标,同时引入了反馈项以提高到达阶段的鲁棒性,从而提高了系统的整体性能。
论文作者:王选、秦洪懋、边有钢、赵德宗、郑楠
论文链接:
https://www.sciencedirect.com/science/article/pii/S1366554524005283?via%3Dihub#ab010


