近日,智能车辆团队论文《Distributed Model Predictive Control of Connected and Automated Vehicles with Markov Packet Loss》在IEEE Transactions on Transportation Electrification发表。
通信丢包普遍存在并且会削弱系统稳定性。本文提出了一种分布式模型预测控制(DMPC)方法,用于马尔可夫通信丢包下的CAV协同控制。首先,对车辆队列系统进行建模,其中每个通信链路的状态用马尔可夫过程描述。其次,通过建立在线开环优化问题设计了DMPC控制器。具体而言,采用自偏差约束来增强对丢包的鲁棒性,并设计了基于一致性协议更新律的终端状态约束来实现终端均方一致性。第三,分析了终端一致性、递归可行性和闭环稳定性,推导了闭环稳定性的充分条件。进一步,设计了一种基于领航车信息的改进队列稳定DMPC。最后,数值仿真和实验表明所提DMPC控制器在跟踪性能和燃油经济性方面优于基准控制器。
本文主要贡献如下:
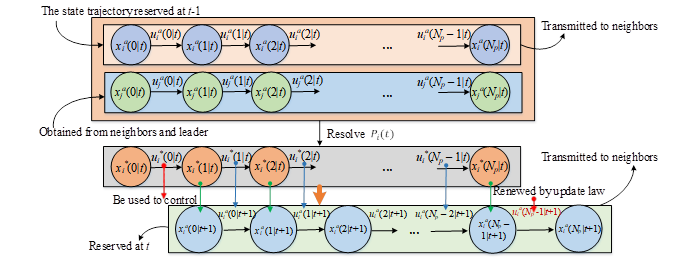
1)针对马尔可夫通信丢包的队列设计了DMPC控制器。在DMPC框架内,采用自偏差约束来增强鲁棒性,并提出一种考虑丢包的一致性协议来设计假设终端状态的更新律。该更新律可以保证终端均方一致性,为闭环稳定性奠定基础。
2)分析了具有马尔可夫通信丢包的队列的闭环稳定性,推导出代价函数权重矩阵的一个充分条件来保持均方闭环稳定性。导出条件为通信丢包情况下代价函数权重矩阵的设计提供了启示,并且利用丢包概率知识降低了闭环稳定性保证的保守性。
3)在DMPC框架内分析了随机丢包下的队列稳定。与现有基于反馈的方法相比,控制器设计中明确包含了多个约束条件和优化目标。
论文作者:边有钢、王选、谭艳、胡满江、杜长坤、孙中奇、郭戈
论文链接:
https://ieeexplore.ieee.org/document/10770256


