近日,智能车辆团队论文《A Fast In-motion Alignment Method for INS/DVL in Rough Sea Conditions》在IEEE Transactions on Instrumentation and Measurement发表。
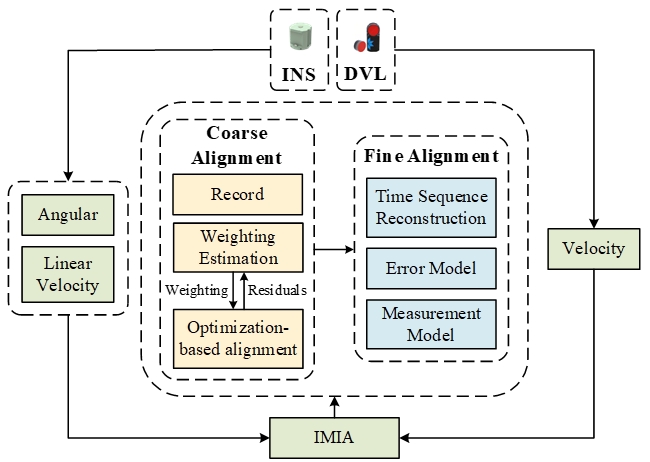
惯性导航系统(Inertial navigation system, INS)/多普勒测速仪(Doppler velocity log, DVL)组合导航是一种成熟的水下导航方法,初始对准是其应用的关键阶段。对准精度和对准时间是提高对准性能的主要挑战。本文主要研究由于声学异常和有限观测时间引起的初始姿态估计误差。为了解决这一问题,首先基于全局最优模型设计了一种新的鲁棒粗对准方法,为精对准阶段提供足够精度的初始姿态以便快速对准。此外,为了在有限观测信息环境下进行快速动态对准,提出了一种基于时序重构的动态对准模型。该算法在仿真及湖泊试验中得到了验证,所提出算法与当前最先进的方法具有相似的精度,并且在动态条件下具有更好的鲁棒性和更快的对准速度。
本文主要贡献如下:
1)针对INS/DVL在机动条件下容易产生声学异常,进而影响对准速度的问题,提出了一种基于全局最优模型的鲁棒粗对准方法。
2)为了实现在信息有限环境下的快速动态对准,推导了基于时序重构的INS误差传播模型及相关动力学模型,同时估计和补偿了DVL刻度因子误差,设计了一种基于时序重构的精对准方法。
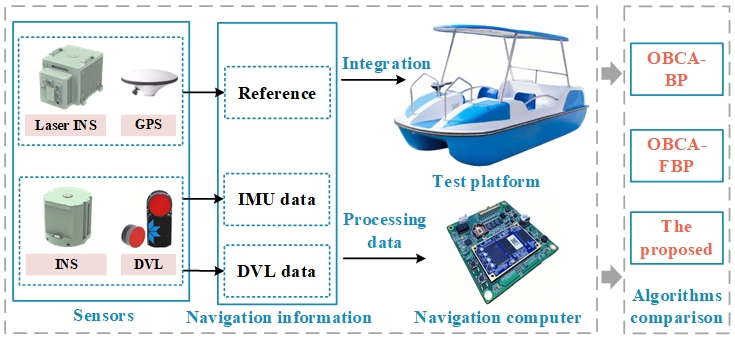
3)进行了仿真和现场试验对比测试,验证了所提出算法相比于其他算法的优越性。其中,现场试验通过自研的导航计算机实时记录及处理试验数据,验证了所提自对准策略在工程上应用的可能性。
论文作者:秦洪懋,王 希,王广才,胡满江,边有钢、秦晓辉、丁荣军
论文链接:https://xploreqa.ieee.org/document/10720235


