近日,智能车辆团队论文《Prediction modeling for yaw motion of deep-sea mining vehicle during deployment and recovery: A physics informed neural network (PINN) approach》在Applied Ocean Research发表。
随着清洁能源技术的进步,特别是电动汽车等领域对金属需求的不断增加,镍、钴和锰等金属的需求也在上升。由于陆地矿产资源逐渐无法满足人类的需求,深海蕴藏着丰富的未开发矿产资源。在深海采矿作业的启动和终止阶段,深海采矿车需要通过脐带缆进行部署和回收。在这一过程中,这些车辆将面临复杂的水下环境,可能会出现围绕脐带缆轴线的不稳定旋转现象。因此,开发深海采矿车在部署和回收阶段的运动模型,并评估其部署、回收控制及系统安全性能,具有重要意义。
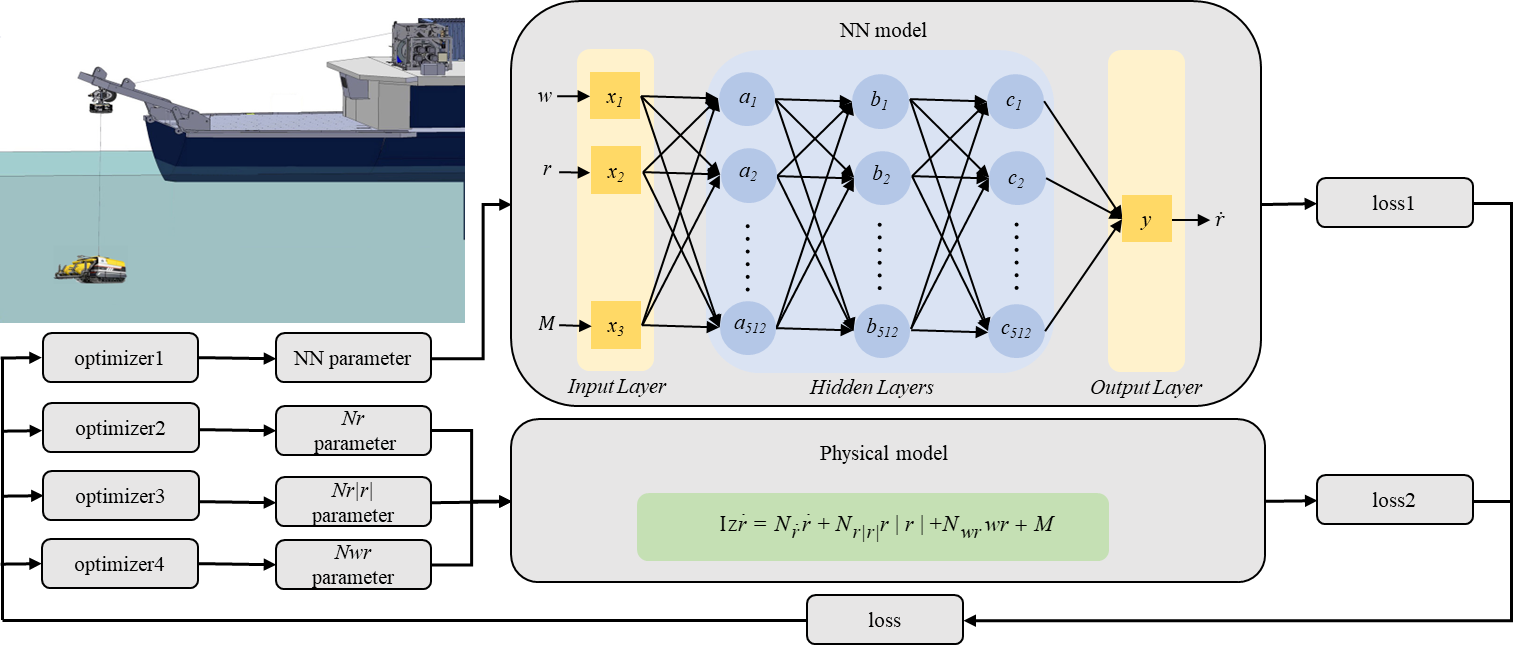
本文提出了一种物理信息神经网络(PINN)方法,用于构建深海采矿车在部署和回收过程中的偏航运动水动力模型。首先,通过将水下车辆的运动方程作为损失函数的一部分,实现参数化和非参数化水动力模型的同步构建和优化。随后,针对深海采矿车“麓山”号,使用计算流体力学(CFD)方法模拟其部署和回收过程。CFD模拟结果被用作采矿车水动力建模的驱动数据,采用新型神经网络方法与传统神经网络(NN)方法进行对比。对比研究表明,新提出的神经网络方法不仅能够实现参数化和非参数化模型的同步识别,还表现出对神经网络过拟合的抵抗力和增强的泛化能力。
主要贡献如下:
1)提出了一种新的神经网络方法,结合水动力模型,以解决深海采矿车辆在部署和回收阶段的航向控制水动力模型的构建问题。该方法有助于同时开发参数化和非参数化的水动力模型,用于控制深海采矿车辆的姿态。
2)为物理信息神经网络(PINN)设计了一种新的损失函数,该函数同时考虑参数化水动力模型损失和神经网络预测损失。这种方法防止神经网络对训练数据的过拟合,从而提高其在操作期间的容错性能。
3)深海采矿车辆的运动方程约束被纳入损失函数中,以避免对局部误差数据的过拟合,并防止在神经网络中产生误导性学习。与传统神经网络方法相比,所提出的PINN表现出更优越的泛化能力。
论文作者:关英杰、边有钢、郑皓、王晓伟、崔庆佳、丁荣军
论文链接:https://doi.org/10.1016/j.apor.2024.104208


