近日,智能车辆团队论文《Longitudinal Vehicle Stability Control Based on Modifed Sliding Mode》在Automative Innovation发表。
为了提高速度跟踪精度,保证车辆在参数不确定性和外部干扰条件下的纵向稳定控制,本文提出了一种改进的滑模控制(SMC)方法。该方法用饱和函数代替了传统SMC中的等速趋近率函数,有效地减少了控制过程中的抖振现象。改进的SMC方法依据纵向车辆动力学模型设计,控制过程分为驱动和制动控制两个阶段。在第一阶段,控制算法计算发动机扭矩或制动扭矩;第二阶段则输出油门开度或制动压力。为了确保驱动模式和制动模式之间的平稳过渡,基于驱动或制动扭矩和速度误差设定的阈值制定了切换规则。同时通过李亚普诺夫稳定性分析了该控制系统的稳定性。为了验证该算法的有效性和实用性,使用CarSim/Simulink进行了仿真,并在林肯MKZ上进行了实车实验。仿真和实验结果表明,改进后的SMC方法即使在速度快速变化的工况下,也能提高速度跟踪精度和纵向控制稳定性。本文主要贡献如下:
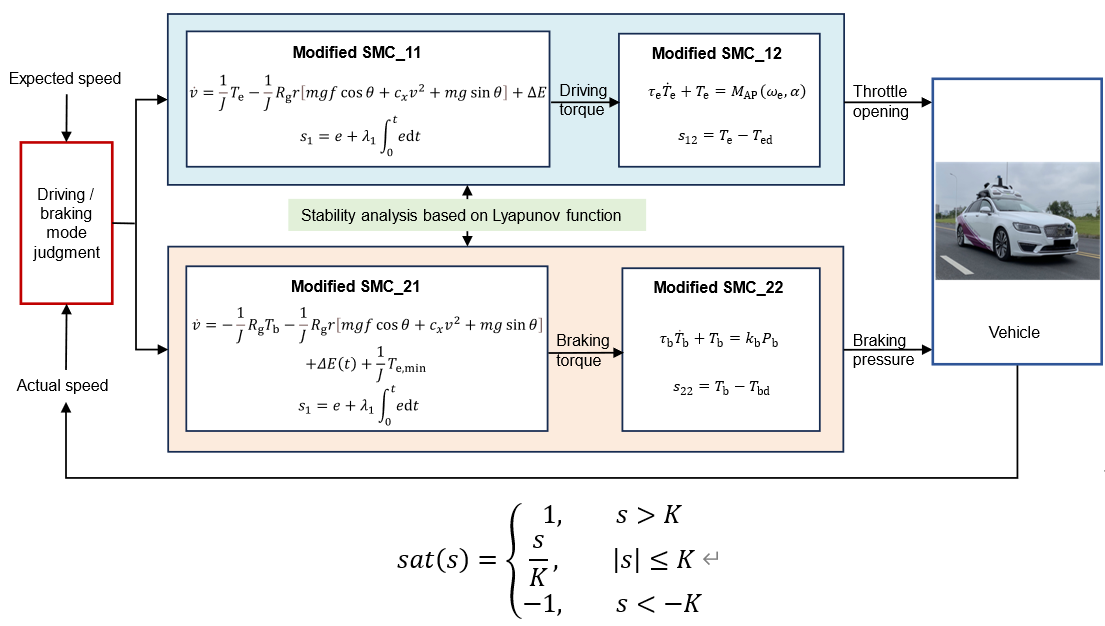

1)改进的SMC方法在控制律中集成了饱和函数,有效地缓解了传统SMC常见的抖振现象,不需要设计额外的减少抖振的算法,并提高了控制器的性能。
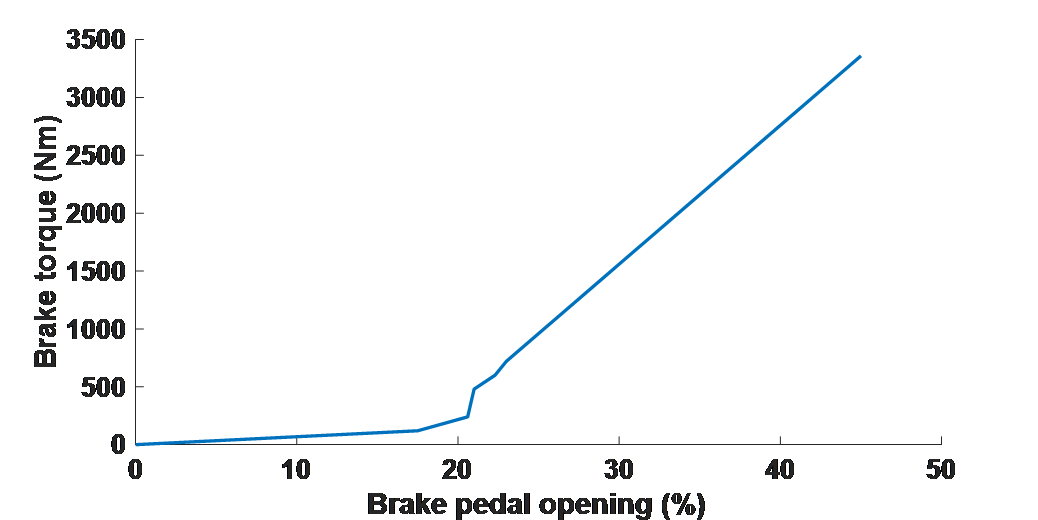
2)对于实际车辆,建立驱动模型和制动模型,以基于发动机扭矩或制动扭矩值来计算节气门或制动踏板开度。
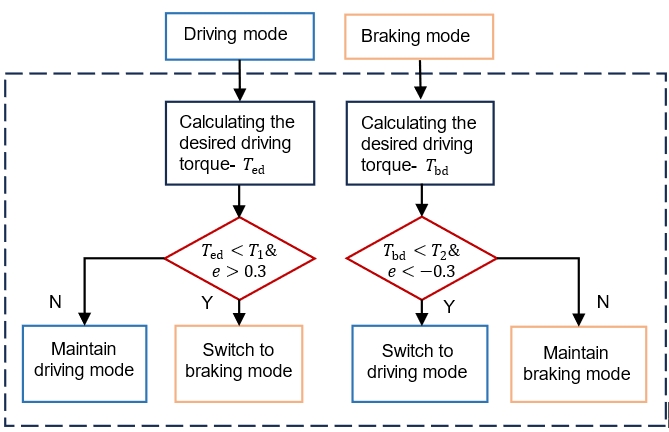
3)与仅基于加速度的传统切换规则不同,本文将速度误差阈值作为模式转换的先决条件,可以确保油门执行器和制动执行器之间的平稳切换。
论文作者:秦兆博、景浩东、陈亮、胡满江、边有钢、崔庆佳
论文链接:https://link.springer.com/article/10.1007/s42154-023-00263-y#citeas


