近日,智能车辆团队论文《Hierarchical Safe Control of Heterogeneous Connected Vehicle Systems Using Adaptive Fault-Tolerant Control》在IEEE Transactions on Vehicular Technology发表。
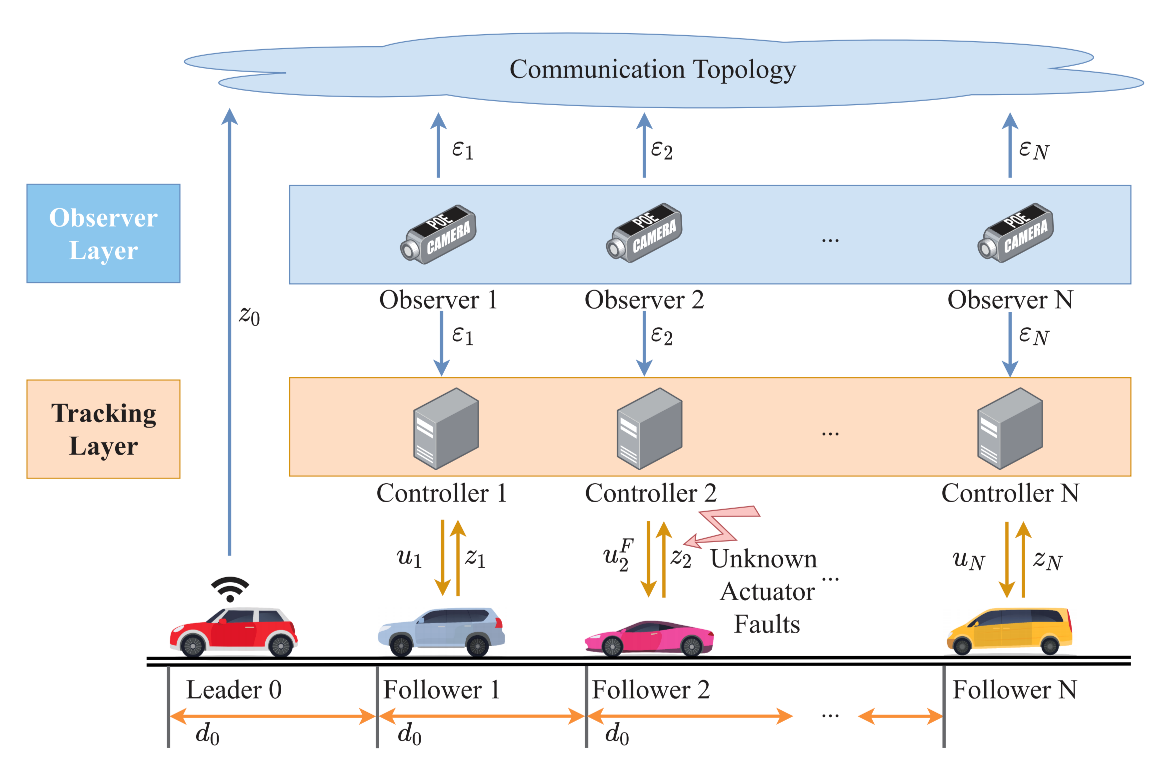
在网联汽车(CV)中发生意外故障是不可避免的,这会对车队造成潜在的安全风险,而在异质参数和结构CV的情况下更具挑战性。为此,本文提出了一种新颖的分层控制框架,将上层观测器层和下层跟踪层整合在一起。基于上层的分布式固定时间观测器,跟随车辆可以通过V2V通信观测到领航车的状态。同时,采用自适应容错控制技术来解决未知执行器故障的问题,并帮助CV跟踪下层跟踪层中观测到的领航车状态。此外,我们制定了两个充分条件,以确保闭环系统的稳定性和所提出的控制框架的可行性。最后,为验证我们的方法,提供了三个数值例子和比较结果,以展示所呈现技术的有效性和竞争力。异构车辆队列的分层安全控制框架如下图。
主要贡献如下:
1)为了减少未知执行器故障的影响并解决异质参数和结构的挑战,我们提出了一种新颖的分层控制框架。它可以避免车辆队列中局部执行器故障的传播,并降低理论结果的复杂性。通过对一种新型调节方程的可解性进行分析,我们在理论上证明了这种分层框架的可行性。
2)为了实现预期的控制目标,我们基于矩阵理论和代数Riccati方程制定了几个充分条件,以保证观测误差和跟踪误差的收敛。此外,我们进行了一系列数值模拟,证明了方法的有效性。
论文作者:王璐、边有钢、曹东璞、秦洪懋、胡满江
论文链接:https://ieeexplore.ieee.org/document/10538067


