近日,智能车辆团队论文《Cyber-Physical-Level Safe Control of Intelligent and Connected Vehicles With Unreliable Communication and Actuator Faults》在IEEE Transactions on Intelligent Vehicles发表。
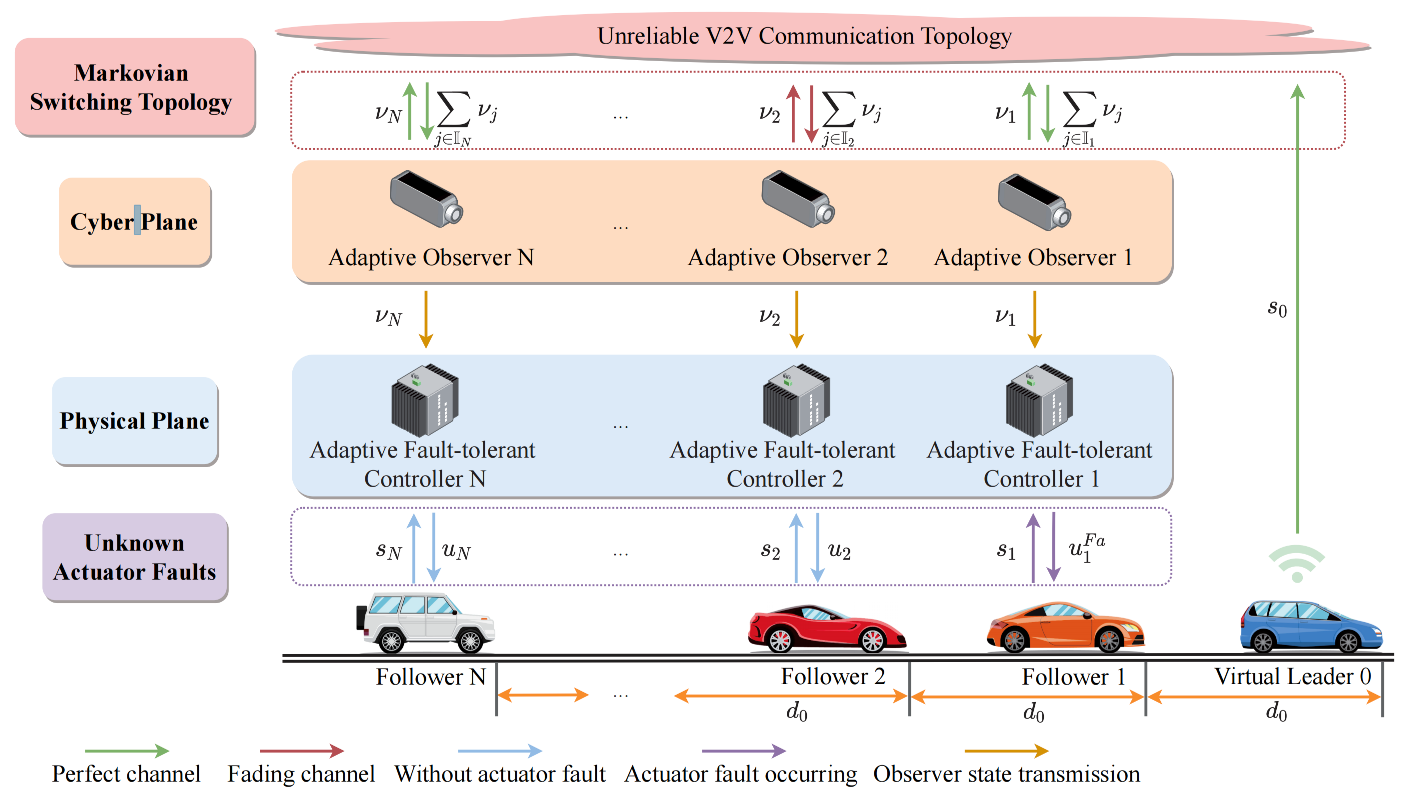
随着V2V技术的发展,车辆队列系统(VPS)的交通安全性和效率通过信息交换得到了显著提升。然而,数据包的丢失可能导致V2V通信不可靠,进而引起通信拓扑的切换,威胁到VPS的安全性。在实际场景中,智能网联汽车(ICV)不可避免地会出现一些未知的执行器故障,这对VPS构成潜在的安全风险。为此,本文提出了一种新颖的基于信息物理层级的安全控制框架,该框架由上层信息层和下层物理层组成。在信息层中,我们使用连续时间马尔可夫链来建模通信拓扑的切换,并为每辆跟随车辆设计了一个完全分布式自适应观测器,以获取领航车的状态。基于物理层的自适应容错控制器,每辆ICV都可以跟踪其观测器状态并补偿未知执行器故障的影响。此外,我们推导出几个充分条件,以保证VPS的均方稳定性并实现预期的控制目标。最后,提供了仿真结果以验证所提出控制方法的有效性并展示其竞争力。基于信息物理层级的安全控制框架如下图。
主要贡献如下:
1)本文提出了一个基于信息物理层级的安全控制框架,包括上层信息层和下层物理层。基于分层控制框架,上层信息层可以集中解决不可靠通信的问题且不受执行器故障的影响,而下层物理层则用于解决局部执行器故障并且不受不可靠通信的影响。与现有的VPS的故障容错控制和不可靠通信相比,可以有效地避免局部执行器故障对整个VPS的影响,并减少对跟随车辆的不可靠通信的影响。
2)在这个框架内,我们为每辆跟随车设计了一个分布式自适应观测器以直接或间接获取信息层中领航车的状态。考虑到通信拓扑是时变的,并且难以获得全局信息,我们提出了一种完全分布式的观测策略。此外,在物理层,设计了一种新颖的自适应容错控制器,用于补偿未知的执行器故障,跟踪其观察器状态,并确保其安全。
3)通过使用代数Riccati方程,建立了两个充分条件,以确保观测器误差系统和闭环系统的渐近均方稳定性。此外,考虑到未知的执行器故障和异质性,提出了一种新颖的调节方程,并分析了其可行性,以确保实现控制目标。
论文作者:王璐、秦洪懋、杭鹏、陈超义、胡满江、边有钢
论文链接:https://ieeexplore.ieee.org/document/10529215


