近日,智能车辆团队论文《Multi-Vehicle Collaborative Trajectory Planning in Unstructured Conflict Areas Based on V-Hybrid A*》在IEEE Transactions on Intelligent Transportation Systems上发表。
冲突区域多车行为多变、冲突关系复杂,多车避碰约束维度大,传统中心式优化求解困难。现有结构化道路冲突区域多车轨迹协同规划研究已取得丰富的成果,但非结构化道路相关研究较少,且存在以下不足:
1)多数研究只考虑了冲突区域单帧状态的协同优化问题,未考虑冲突区域车辆动态行驶的滚动协同优化,未考虑冲突区域车辆增减、移动的连续时空动态过程。
2)多数研究将车辆的行驶路径提前渠化,多车轨迹协同规划的问题本质上已经降维为速度协同规划问题,并不能充分发挥非结构化区域车辆可自由行驶的灵活性,无法得到适应非结构化道路特征的最优通行解。
3)现有研究通常将交通流假设为理想均匀环境,各车辆按照固定频率固定间距驶入,在真实交通流环境下,此类方法避碰约束维度呈指数增加,往往无法求解成功,无法满足实时性要求。
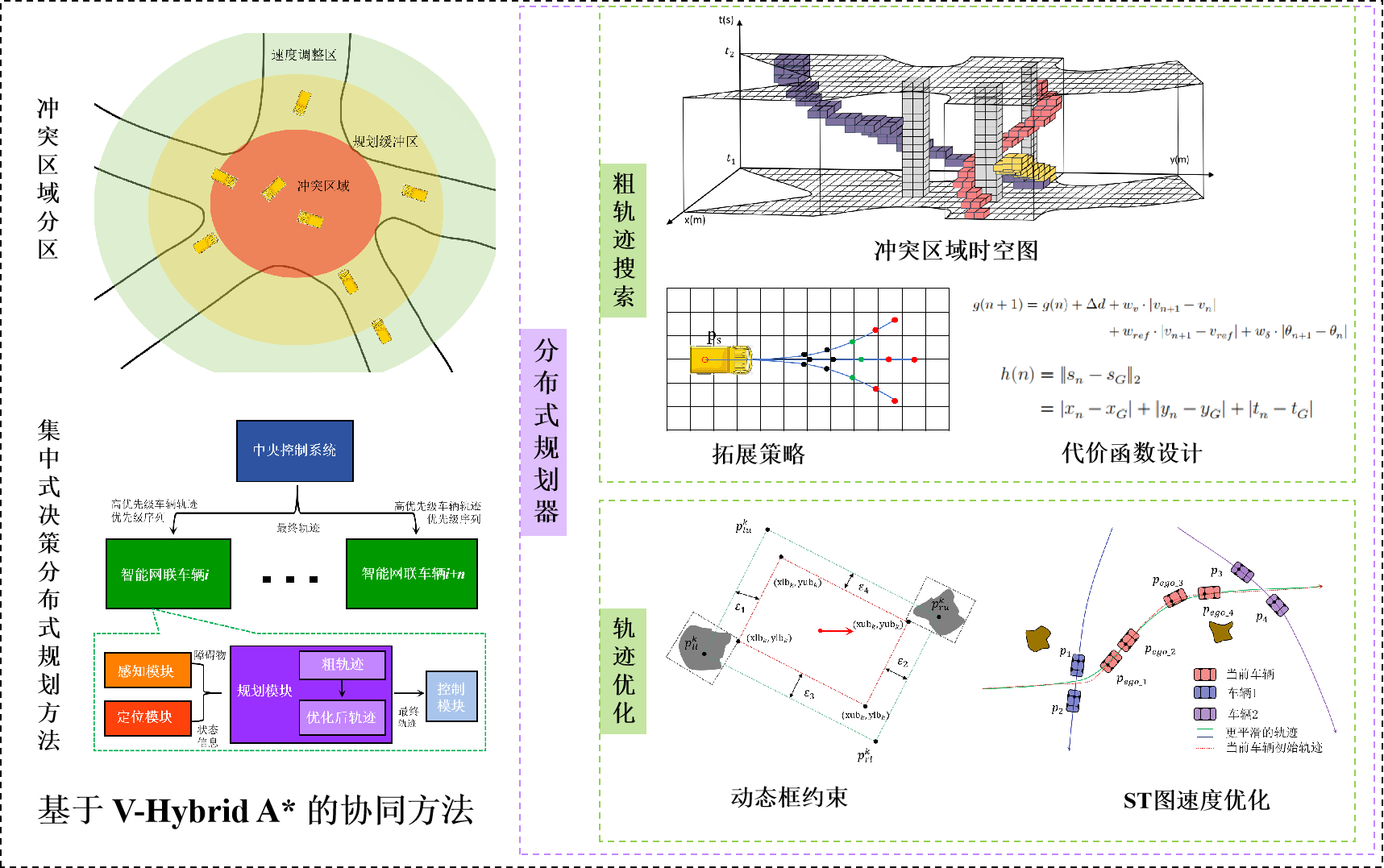
针对以上挑战,本文提出了一种基于V-Hybrid A*的多车协同轨迹规划方法。具体而言,基于地图数据结构以及时间维度信息构建冲突区域时空资源三维地图。设计一种拓展时间维度的三维图搜索方法V-Hybrid A*以直接获取带有离散速度的轨迹。通过固定时间步长并在各离散转角方向上采样合适加速度,获取带有离散速度粗轨迹。改进代价函数评价指标,增加时间维度评判标准,获取更完美的父节点。构建考虑路径平滑度、路径紧凑度和原始路径的偏移程度等指标的目标函数,在双冗余安全方盒等约束条件下进行二次规划求解。建立优化路径ST图并基于粗解开辟优化凸空间,构建考虑参考速度偏移程度、加速度累加以及加速度平滑的目标函数,以速度限制、加速度限制、横向加速度限制为约束条件进行二次规划求解。
主要贡献归纳如下:
1)本文提出了一种集中式决策分布式规划框架,旨在降低中央控制系统计算负担。该框架在发挥车辆协作潜能的同时具备更强的环境适应能力。
2)本文所设计的三维图搜索方法V-Hybrid A*可快速协调车辆之间的冲突关系并提供较好的初始解,降低轨迹优化耗时。
3)结果表明,与同类多车协同方法相比,所提出方法平均车速提升15%,路口空间利用率提高10%。
论文作者:徐彪、王冠、杨泽宇、边有钢、王晓伟、胡满江
论文链接:https://ieeexplore.ieee.org/document/10499865


