近日,智能车辆团队论文《Progressive Critical Region Transfer for Cross-Domain Visual Object Detection》在IEEE Transactions on Intelligent Transportation Systems上发表。
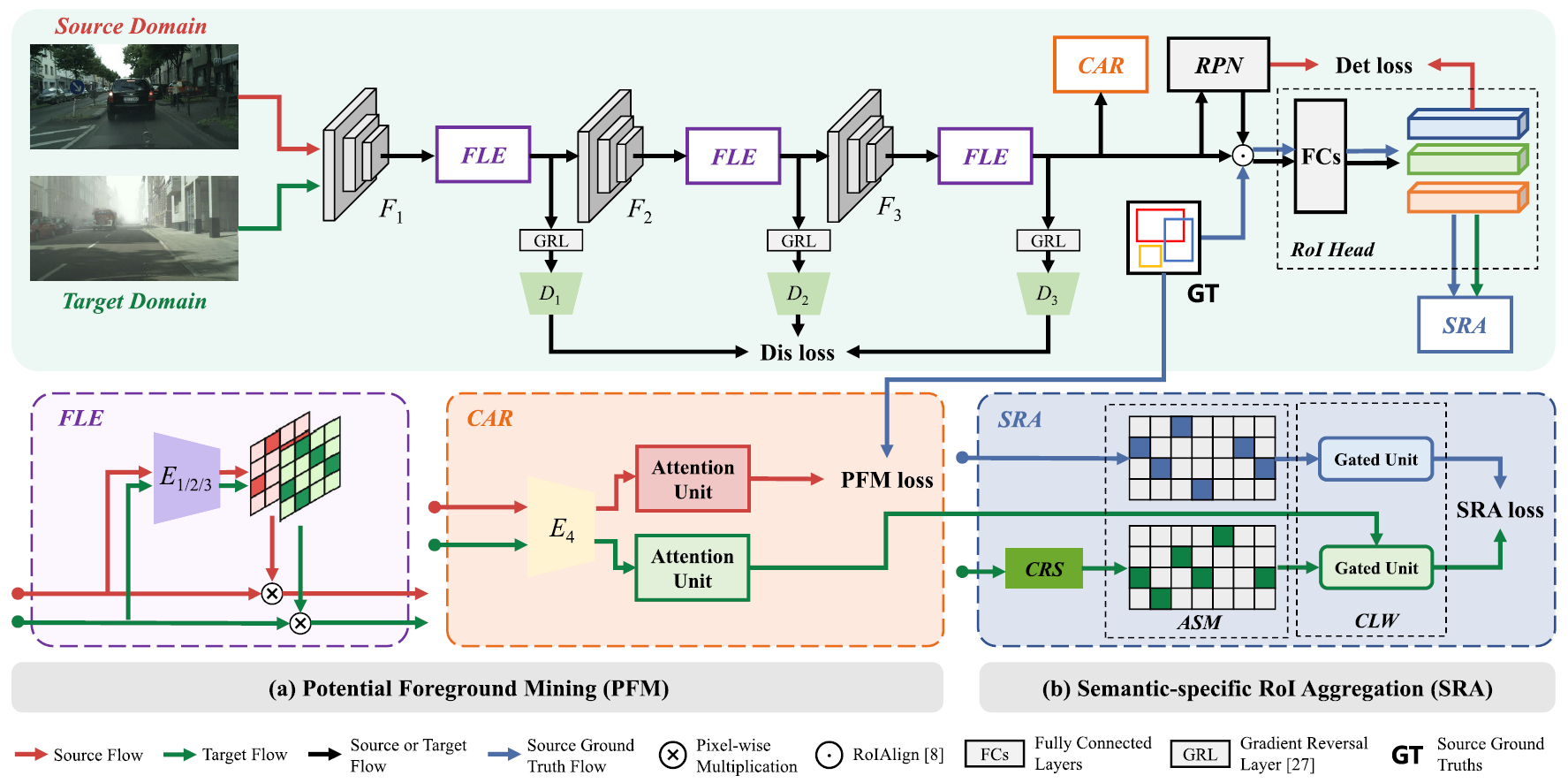
由于域漂移的影响,已训练的视觉目标检测器在部署于全新的驾驶场景时,通常会面临严重的性能下降问题。尽管对抗训练在无监督域自适应视觉目标检测领域已经取得了出色的性能,但相关方法未能捕获到整体布局下的迁移核心。针对该问题,本文提出了一种渐进式关键区域迁移的跨域视觉目标检测框架。具体而言,本文设计了潜在的前景挖掘(potential foreground mining, PFM)模块和语义特定的RoI聚合(semantic-specific RoI aggregation, SRA)模块来提高跨域检测框架的鲁棒性。两个模块共同沿着视觉检测流程,将自适应重心从整体布局转变到潜在的前景区域,进一步转变到信息丰富的感兴趣区域。实验表明,渐进式关键区域迁移框架在跨恶劣天气、跨相机配置和跨复杂场景自适应中取得了最先进的性能。
本文提出了一种渐进式关键区域迁移的跨域视觉目标检测框架,主要贡献归纳如下:
1)本文提出了一种新型的跨域检测框架,旨在将已训练的视觉目标检测器适配到真实世界的场景。该框架能够依次对广义上的关键区域、狭义上的关键区域进行渐进式迁移。
2)本文所设计的潜在的前景挖掘模块用于在整幅图像中搜寻前景区域,并对其进行跨域迁移;所设计的语义特定的RoI聚合模块用于增强跨域RoI的聚合,无需关注语义的共现关系。
3)本文在多个自动驾驶数据集上开展综合实验。结果表明,在跨恶劣天气、跨相机配置和跨复杂场景自适应3种典型情况下,所提框架的性能分别比基线提高了19.4%、5.0%和6.1%。
论文作者:王晓伟、蒋沛文、李洋、胡满江、高铭、曹东璞、丁荣军
论文链接:https://ieeexplore.ieee.org/document/10496362


