近日,智能车辆团队论文《Density-Aware U-Net for Unstructured Environment Dust Segmentation》在IEEE Sensors Journal上发表。
高效、准确地分割采矿环境中的灰尘区域,可以提高无人驾驶车辆的环境感知性能。本文提出了一种基于密度感知嵌套U结构卷积神经网络(DAUnet)的灰尘分割方法。与现有的灰尘分割方法相比,该方法具有三个优点。首先,提出了Residual channel-spatial attention (RCSA)块,该块包含两个注意层和一个残差结构,可以更有效地提取特征。其次,引入差异扩大化层,该结构对预测的灰尘概率进行过滤,去除概率较低的像素点,然后将相似的概率值映射到较大的概率区间,从而提高网络性能。最后,对于灰尘可视化,我们使用预测概率来反映灰尘浓度,从而使灰尘边缘和背景之间的过渡更加平滑。此外,构建了基于真实露天采矿环境的MineDust (MD)数据集用以训练模型。
本文提出一种DAUnet方法。本研究的主要贡献可归纳如下:
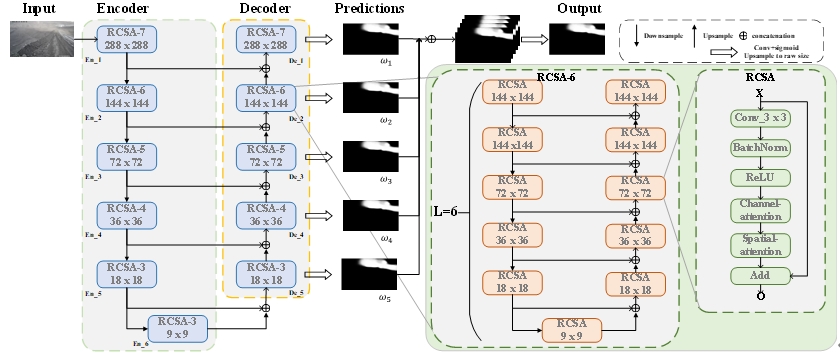
1)提出了一种新的密度感知网络(DAUnet)。该网络采用残差通道-空间注意(RCSA)块提取特征。RCSA引入了通道注意和空间注意,克服了传统CNN在处理不同尺度、形状和方向信息时的局限性。此外,该网络还引入了差异扩大化层。该模块对预测的粉尘概率进行过滤,剔除概率较低的像素点,然后将相似的概率值映射到较大的概率区间,从而提高网络的性能。
2)对于灰尘可视化,现有的分割方法无法区分灰尘浓度的差异。使用预测概率来反映灰尘浓度,从而使灰尘边缘和背景之间的过渡更加平滑。较高和较低浓度的区域将分别对应较高和较低的灰度像素值。
3)露天采矿环境的公开灰尘数据集较少。基于真实的露天采矿环境构建了MineDust (MD)数据集。该数据集由不同天气条件和复杂场景下的灰尘状态图像组成。这可以为该方法的训练和实验提供数据支持
论文作者:付尧、高铭、谢国涛、胡满江、魏辰峰、丁荣军
论文链接:https://ieeexplore.ieee.org/document/10418077


