近日,智能车辆团队论文《Data-Enabled Tire-Road Friction Estimation Based on Explainable Dynamics Mechanism Under Straight Stationary Driving Maneuvers》在交通领域顶刊IEEE Transactions on Intelligent Transportation Systems上发表。
路面附着系数作为车辆行驶模型的重要参数之一,深度影响着车辆控制性能。随着人工智能的快速发展,如何快速、准确和高效地利用机器学习的方法实现路面附着系数估计,是电动轮车辆动力学控制的前沿探索方向。
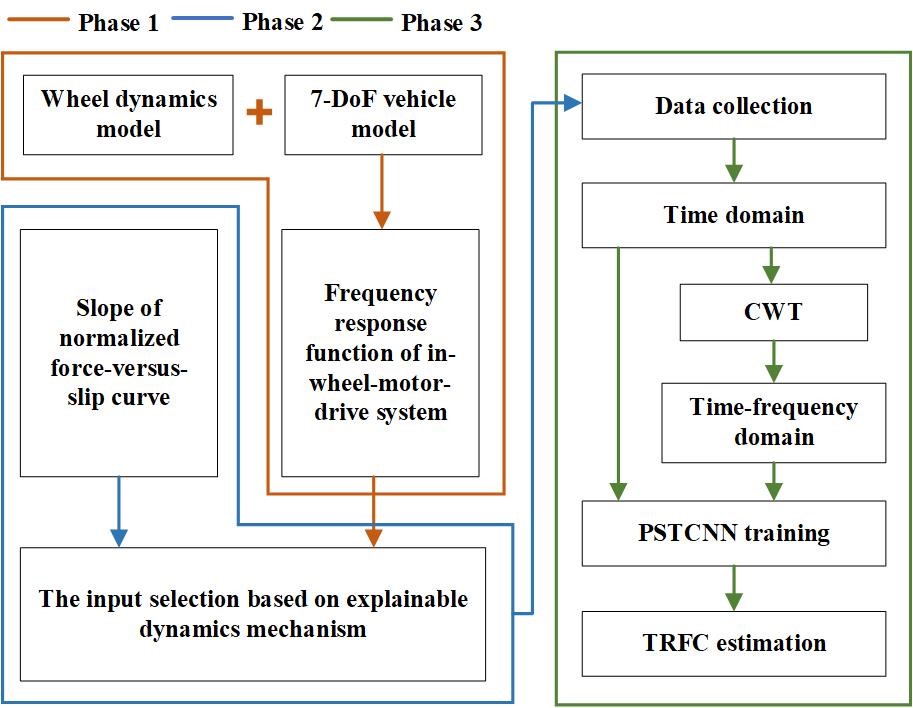
本文在理论研究方面提出了一种多域融合特征提取的路面附着系数估计策略。首先,由车辆纵向动力学和车轮动力学推导了轮毂电机驱动系统的频率响应模型。其次,分析了路面附着系数对电动轮车辆动力学参数的影响机理,通过频率响应特征分析和可解释性动力学机制确定了神经网络学习策略的模型输入选择方法。随后,建立了并行时空卷积神经网络提取时域和时频域的特征,实现了直线静态驾驶机动下的路面附着系数的高精度估计。路面附着系数估计架构图如下图。
主要创新点如下:
1)相较于现有基于纵向动力学的路面附着系数估计的方法,本方法结合了时域动力学和时频域动力学特征,提高估计精度的同时还不需要充分的轮胎滑移率激励。
2)从频域角度建立了电动轮驱动系统的动力学模型,通过频率响应特征分析和可解释性动力学机制确定了神经网络学习策略的模型输入选择方法。
3)为了处理连续的车辆状态信号和时频数据,本文设计了并行时空卷积神经网络同时提取时域数据和时频域数据的时空特征。
论文作者:陈亮、秦兆博、胡满江、边有钢、彭晓燕、潘为
论文链接:https://ieeexplore.ieee.org/document/10433934


