近日,智能车辆团队论文《Channel-Level Event-Triggered Communication Scheme for Path Tracking Control of Autonomous Ground Vehicles With Distributed Sensors》在IEEE Transactions on Vehicular Technology发表。
针对地面自主车辆在车载网络中的路径跟踪控制问题,本文提出一种基于事件触发的信道级通信方案,在保证路径跟踪性能的同时有效降低了网络资源利用率。首先,考虑范数有界不确定性对车辆横向动力学的影响,建立了路径跟踪系统,并在Takagi-Sugeno(T-S)模糊框架下设计了状态反馈路径跟踪控制器。其次,传感器与控制器之间采用一种去中心化的事件触发通信机制,使得信道层面节省通信资源成为可能。结果表明,所提控制器在横向偏移和航向误差情况下均能保证可靠的路径跟踪性能,同时与时间触发方案相比,所提方法能够有效减少80%以上的通信资源使用。
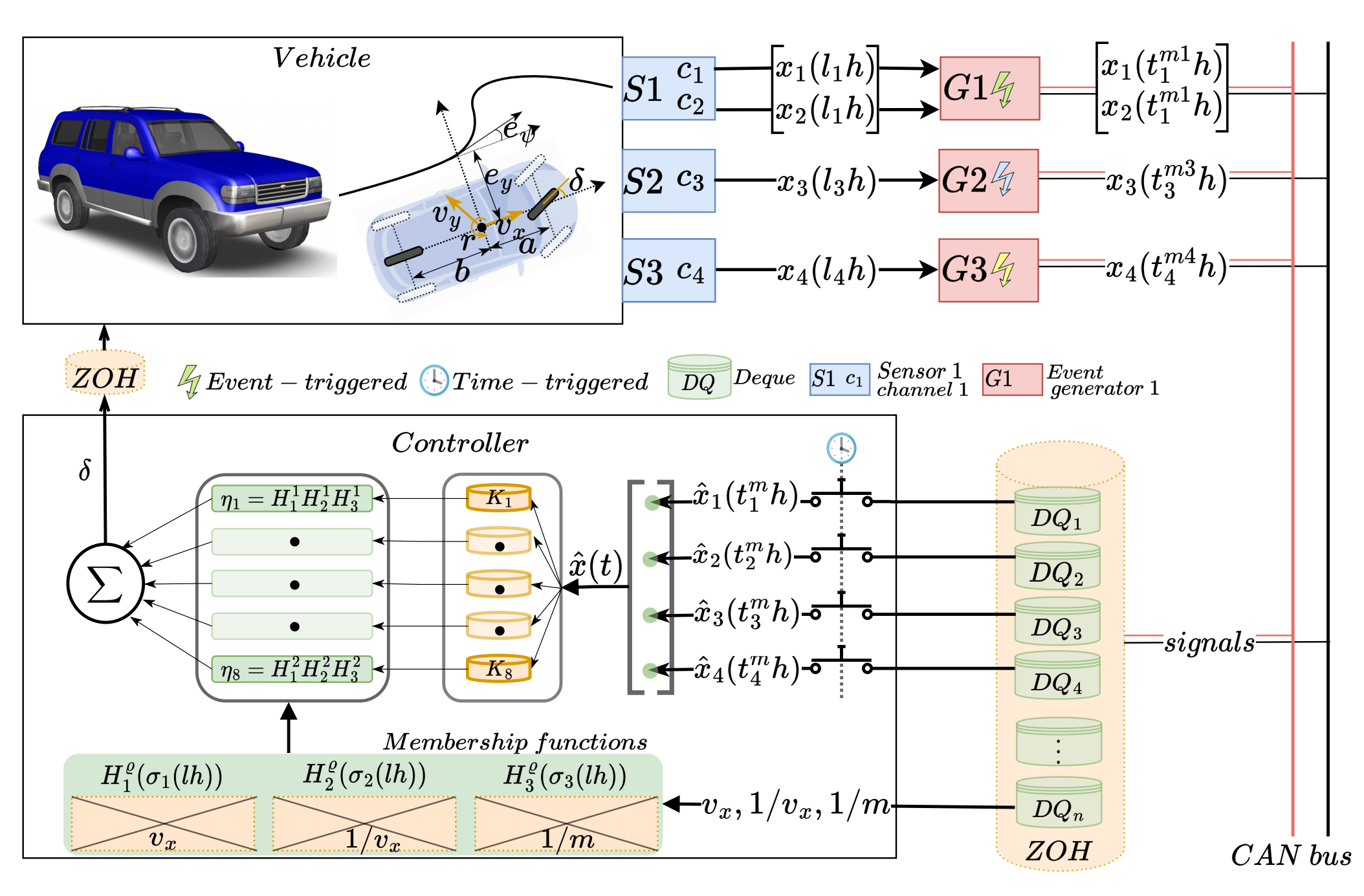
本文主要贡献如下:
1)考虑车辆控制系统状态感知和通信的分布特性,提出了一种用于路面自主车辆路径跟踪控制的状态感知和通信控制模型,取消了状态同步感知的假设,从而在每个测量信道上实现事件触发通信,进一步节省了通信资源。
2)考虑车辆质量、纵向速度和轮胎侧偏刚度等不确定性的影响,建立了通用T-S模糊横向动力学模型,并采用不完全前提匹配方法设计了路径跟踪控制器,该控制器不需要与T-S模糊系统采用相同的前提变量,具有更大的设计灵活性。
3)通过分析典型车辆试验周期和CAN通讯诱导延误特性,提出一种确定隶属函数参数的算法,以确保隶属函数设计条件始终保持不变。
论文作者:张立钦、胡满江、张辉、边有钢、Anh-Tu Nguyen、丁荣军
论文链接:https://ieeexplore.ieee.org/document/10121695


