近日,智能车辆团队论文《Target-free Stereo Camera-GNSS/IMU Self-Calibration Based on Iterative Refinement》在IEEE Sensors Journal发表。
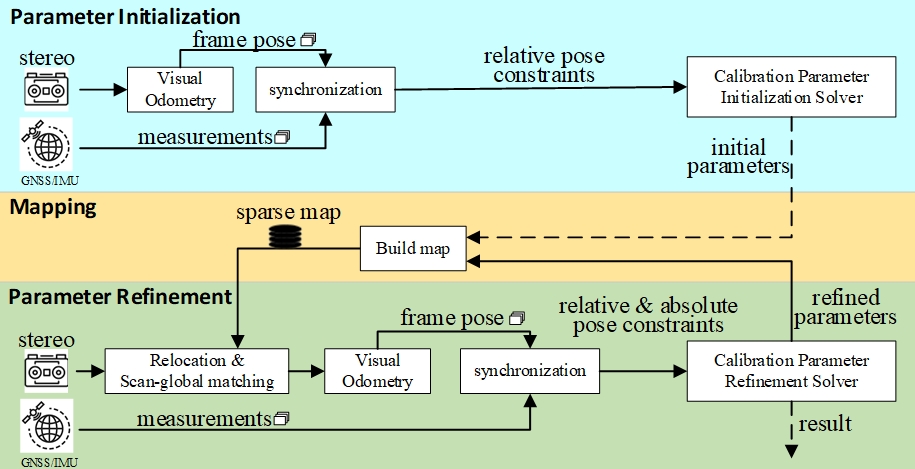
本文提出了一种基于运动约束的自动标定方法。相较于基于特征对齐的标定方法,该方法摆脱了对标定标签及专业标定场的依赖,简化了标定流程。本文充分利用相对运动约束和绝对运动约束,相比传统手眼标定,有效提升对多标定外参的可观测性。首先,基于视觉SLAM估算相机运动,利用相对运动约束恢复外参初值。为消除SLAM位姿估计误差对标定精度的影响,同时改善多自由度参数空间的可视性,设计基于地图配准位姿估计的相对运动约束与绝对运动约束耦合的外参优化方法。此外,构建迭代优化框架,不断减小地图误差,使得标定参数逐渐收敛至真值。最后,基于仿真数据和实车数据对所提标定方法进行测试,并与传统经典方法和现有方法开源方法进行对比。试验结果表明,本文方法不仅环境适应性强、自动化程度高,而且具有更高的标定精度。
论文作者:常灯祥、黄圣杰、周云水、秦晓辉、丁荣军、胡满江
论文链接:https://ieeexplore.ieee.org/abstract/document/10371208


