近日,智能车辆团队论文《WiCRF2: Multi-weighted LiDAR Odometry and Mapping with Motion Observability Features》在IEEE Sensor Journal发表。
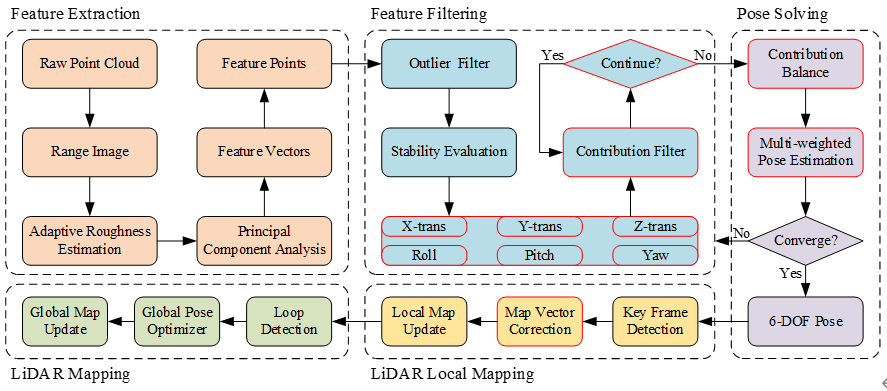
本文提出了一种基于可观测性特征的激光雷达SLAM系统。该系统将特征提取和运动约束构建进行耦合。相较于独立的特征提取和运动约束构建,耦合系统有利于筛选空间中可观测性特征,便于构建平衡运动约束。首先,估算平面点和边线点对6DoF运动约束的贡献,筛选具有良好运动可视性的特征。此外,根据所有特征对各自由度运动约束的大小对点-面约束和点-线约束进行加权,获取更加均衡的运动约束。特征提取和运动约束构建的紧密关联,减少了冗余特征和冗余约束,增强了部分稀疏特征约束,有效提升了系统在特征匮乏环境下的鲁棒性和精度。其次,在地图中引入特征向量,并利用最新关键帧对地图向量进行更新,提升地图一致性和准确度,进一步降低特征向量估计误差对位姿优化的影响。最后,在室内和室外特征稀疏环境对所提定位系统进行测试,并与现有方法进行对比。试验结果表明我们的方法具有更高的定位精度和鲁棒性。本文主要贡献如下:
1)引入运动可观测性特征和基于运动约束贡献度的加权重投影参数,增强系统在特征分布失衡和特征稀疏环境下的定位精度和鲁棒性。
2)入地图向量自检算法,利用领域空间特征局部一致性对错误特征向量进行识别并修正,有效提升了地图精度,抑制了特征向量估计误差对定位精度的影响。
论文作者:常灯祥、黄圣杰、张润邦、胡满江、丁荣军、秦晓辉
论文链接:https://ieeexplore.ieee.org/abstract/document/10197305


