近日,智能车辆团队论文《A novel INS/USBL/DVL integrated navigation scheme against complex underwater environment》在Ocean Engineering发表。
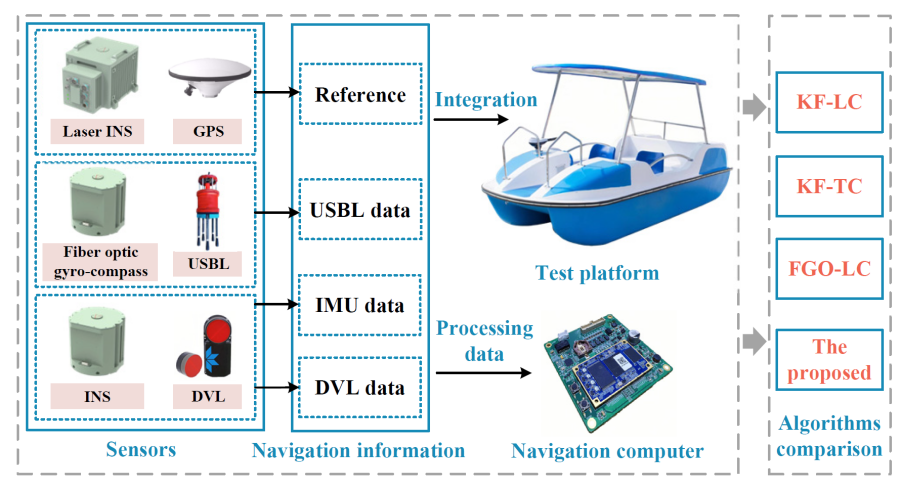
针对水下环境复杂,传感器异常值较多,传统卡尔曼滤波定位方法往往难以实现精确定位。为解决这一问题,本文提出一种基于因子图优化(FGO)的紧耦合INS/USBL/DVL方案和核心融合算法。采用FGO方法构建紧耦合INS/USBL/DVL因子图模型,加入粗差检测函数调整各因子的权重,从而提高水下传感器信息利用率,改善了水下导航精度及可靠性,并通过仿真及湖泊实验证实了该方案的合理性。结果表明,所提出方法相比于KF-LC、KF-TC和FGO-LC方法,水平位置精度分别提高了29.2%、6.6%和13.2%,且在出现异常传感器信息时有较为平顺的导航误差表现。本文主要贡献如下:
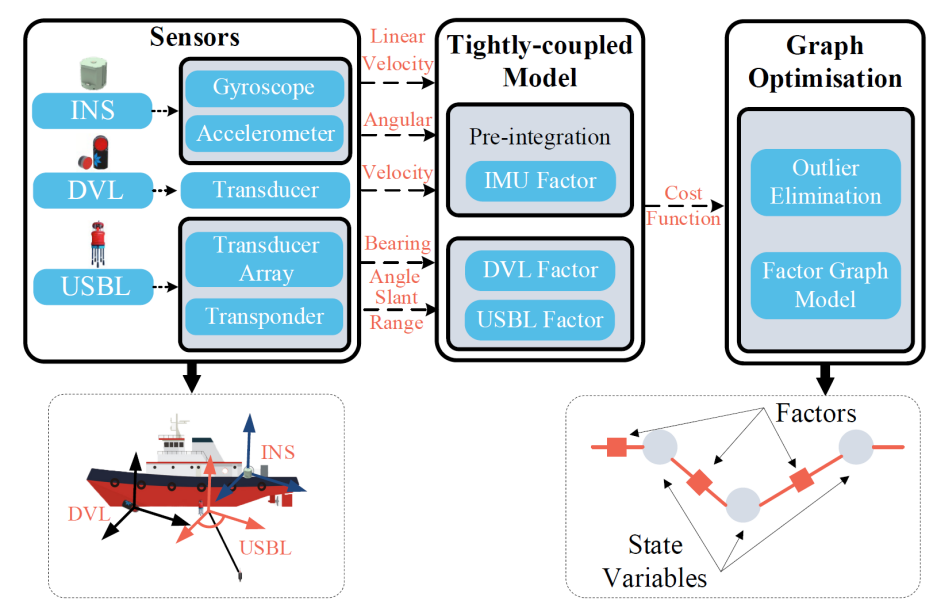
1)在FGO框架下,提出了一种基于紧耦合的INS/USBL/DVL组合导航模型。
2)为了解决量测中存在的异常干扰问题,将基于M估计的鲁棒算法加入到因子图模型中,以避免传递异常值对整个模型产生负面影响。
3)全面比较了卡尔曼滤波和FGO在INS/USBL/DVL组合导航系统中LC和TC方面的性能。
4)验证了基于因子图优化的组合导航技术在工程上应用的可能性。
论文作者:秦洪懋,王 希,王广才,胡满江,边有钢、秦晓辉、丁荣军
论文链接:https://authors.elsevier.com/a/1hXU96nh74nx5


