近日,智能车辆团队论文《DMPC-based string stable platoon control with robustness against communication delays》在Vehicular Communications发表。
本文提出了一种基于DMPC的抗通信时延队列稳定控制方法。首先,建立三阶异质车辆模型;然后,设计同步机制以克服通信时延对信息获取的负面影响;最后,结合同步机制和双模机制设计满足队列稳定性的DMPC控制器。仿真结果表明,所提方法相比于传统DMPC和考虑时延的线性控制器在队列稳定性、跟踪性能和期望间距选取方法有较大优势。本文主要贡献如下:
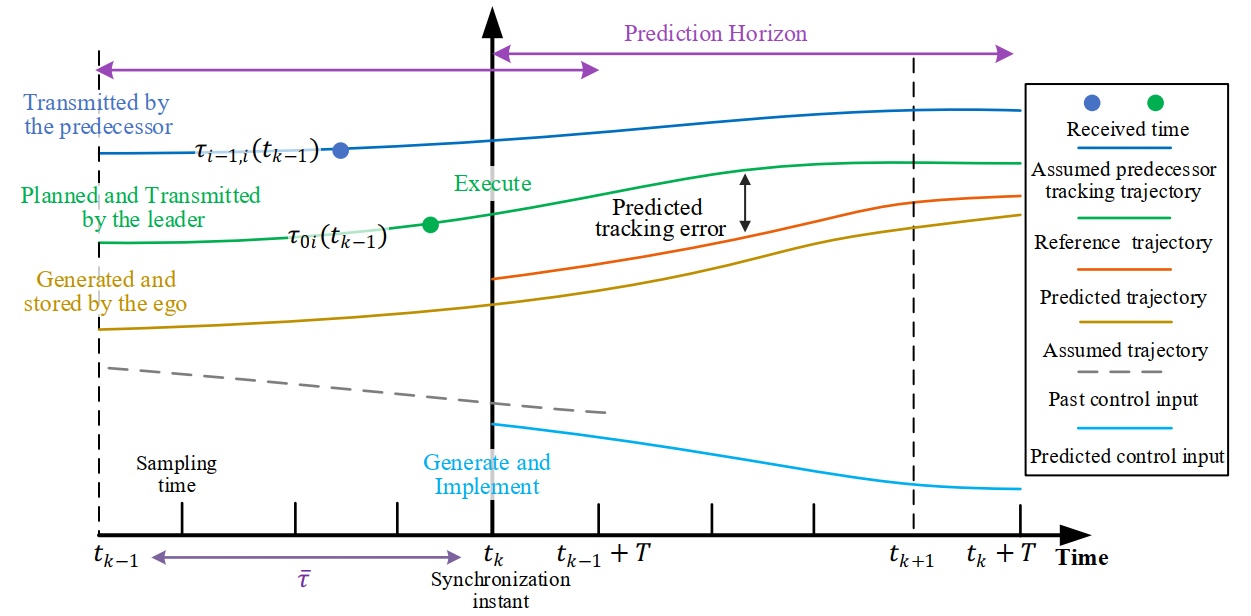
1)针对异质队列系统,提出了的基于DMPC的抗通信时延队列稳定控制方法,通过结合所提的同步机制,保证了通信时延条件下控制器的迭代可行性、闭环稳定性和队列稳定性。
2)不同于现有基于恒定时距的时延补偿策略,所提方法基于恒定间距策略,使得期望间距不会随通信时延上界增长,有利于提高交通流密度。
3)与现有DMPC方法相比,本文移除了常见的领航车恒定速度假设,有利于提高动态场景中的队列跟踪性能。
论文作者:王选、胡满江、边有钢、王晓伟、秦洪懋、丁荣军
论文链接:https://www.sciencedirect.com/science/article/pii/S2214209623000852?via%3Dihub


