近日,智能车辆团队论文《Improved LiDAR-camera Calibration Based on Hand-eye Model under Motion Limitation》在IEEE Sensors Journal发表。
本文提出了一种基于改进手眼标定的相机-激光雷达外参标定方法。由于车辆通常维持三自由度平面运动,传统手眼标定方法难以得到准确标定值。本文分析了不同运动模型分别对旋转外参和平移外参的影响,设计了分步式标定方法。首先,结合地面模型改进了传统的二维码定位方法,抑制其模糊性的同时大幅提升定位精度。然后,对传统手眼标定模型进行拆分,并使用其直线运动部分标定旋转外参、使用旋转运动部分标定平移外参,分析轨迹的几何特性以提升求解效率。实验结果表明,我们的方法具有较高的标定精度,可以广泛应用于运动受限(三自由度运动)场景。本文的主要贡献如下:
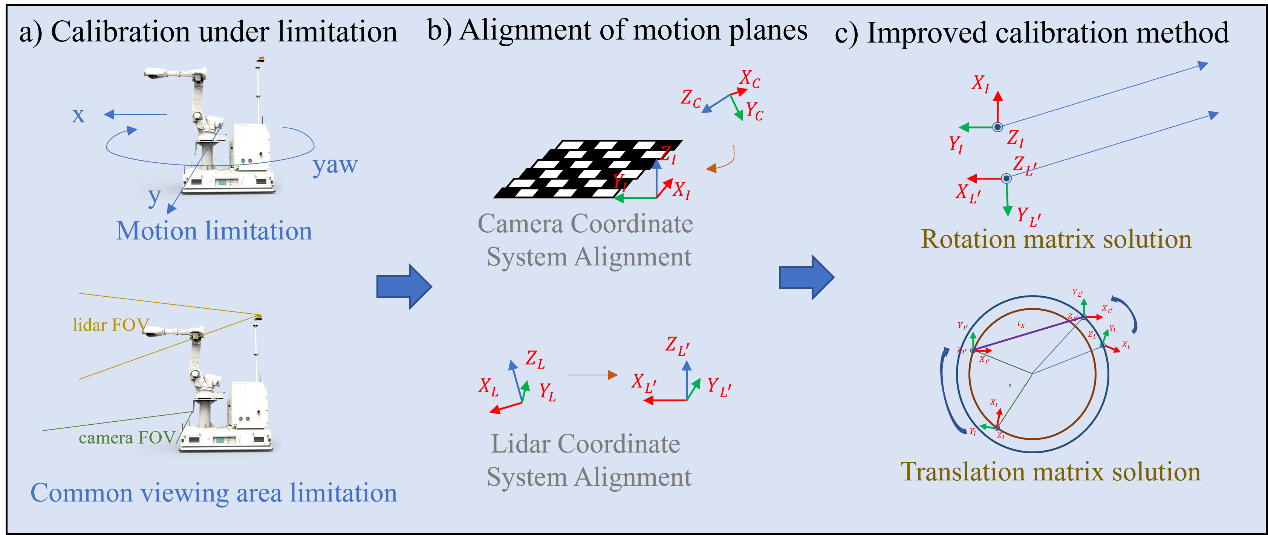
1)提出了一种新的校准模型,即使在没有共视区域且具有3自由度(x、y、yaw)运动限制的情况下,也能精确校准6自由度外参(x、y、z、yaw、pitch、roll)。
2)提出了一种几何方法来求解外参,该方法可以有效提升求解效率。
3)结合地面模型改进了传统二维码定位方法,有效避免了检测模糊性的同时大幅提升了定位精度。
论文作者:李建中、胡满江、刘硕、常灯祥、周云水、秦晓辉
论文链接:https://ieeexplore.ieee.org/document/10184217


