近日,智能车辆团队论文《Versatile Multi-LiDAR Accurate Self-calibration System Based on Pose Graph Optimization》在IEEE Robotics and Automation Letters发表。
本文提出了一种基于全局姿态图优化的新型多激光雷达自校准系统。首先,引入运动激励滤波器提升相对运动约束对多自由度外参空间的可见性。然后,使用参考激光雷达的位姿序列构建点云图,根据帧-地图匹配获得每个激光雷达的绝对姿态,并基于绝对运动约束构建全局位姿图优化系统。实验结果表明,我们的方法具有较高的标定精度,可以应用于不同的激光雷达、不同的环境,并且具有较高的自动化程度。本文主要贡献如下:
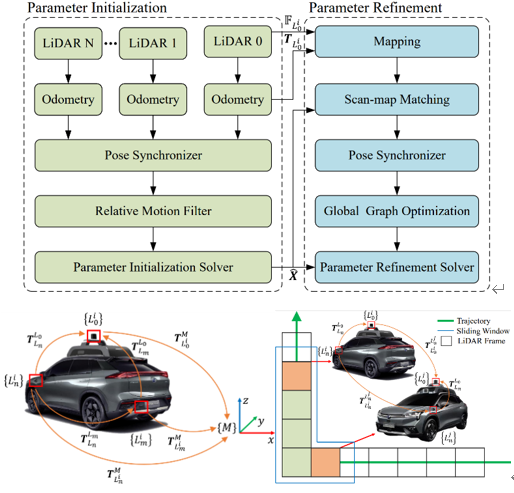
1)引入基于滑动窗口的运动激励滤波器构建最佳的相对运动约束,以平衡运动失真和空间约束不足对标定精度的影响。
2)引入了基于扫描图匹配的绝对运动约束,不仅为6DoF参数空间提供了足够的可观测性,而且消除了里程计漂移对标定精度的影响。
3)提出基于姿态图的全局优化框架,避免标定误差沿激光雷达链传播,提高了多个外参全局一致性。
论文作者:常灯祥、张润邦、黄圣杰、胡满江、丁荣军、秦晓辉
论文链接:https://ieeexplore.ieee.org/document/10167715


