近日,智能车辆团队论文《Tightly-coupled Information Fusion for SINS/DVL/USBL Integrated Navigation of UUV》在IEEE Transactions on Instrumentation and Measurement发表。
本文提出了一种基于集中卡尔曼滤波的紧耦合导航系统。构建并推导了26维SINS/DVL/USBL紧耦合量测模型。进行了仿真和对比实验,结果表明,在部分量测信息缺失的情况下,SINS/DVL/USBL紧耦合可以利用剩余的量测信息进行融合,相比于松耦合具有更好的定位精度和更高的可靠性。本算法能够完成长时间高精度的水下导航定位,具有可行性。本文主要贡献如下:
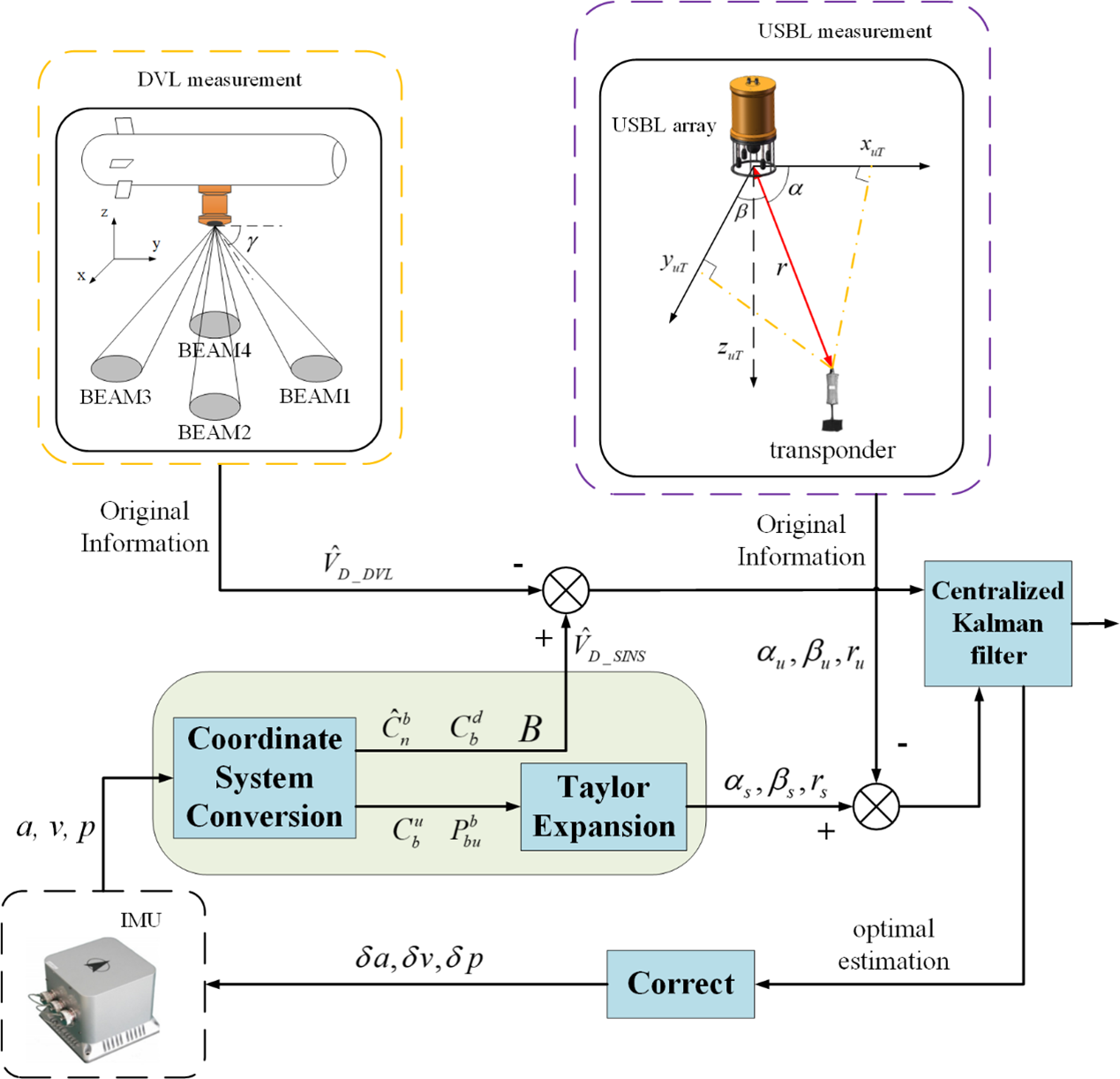
1)提出了一种基于集中卡尔曼滤波器的SINS/DVL/USBL紧耦合算法。该算法可以同时将DVL和USBL的原始数据与SINS信息融合,构建和推导了一个26维紧耦合观测模型。
2)通过仿真和实验验证了该算法的性能,在DVL以及USBL部分测量信息缺失时,仍能保证高精度和可靠性,可以在更复杂的外部环境中完成长时间高精度导航的算法任务。
论文作者:边有钢、李若天、王广才、秦晓辉、胡满江、丁荣军
论文链接:https://ieeexplore.ieee.org/document/10130687


