近日,智能车辆团队论文《Robust Interactive Multi-Model INS/DVL Intergrated Navigation System with Adaptive Model Set》在IEEE Sensors Journal上发表。
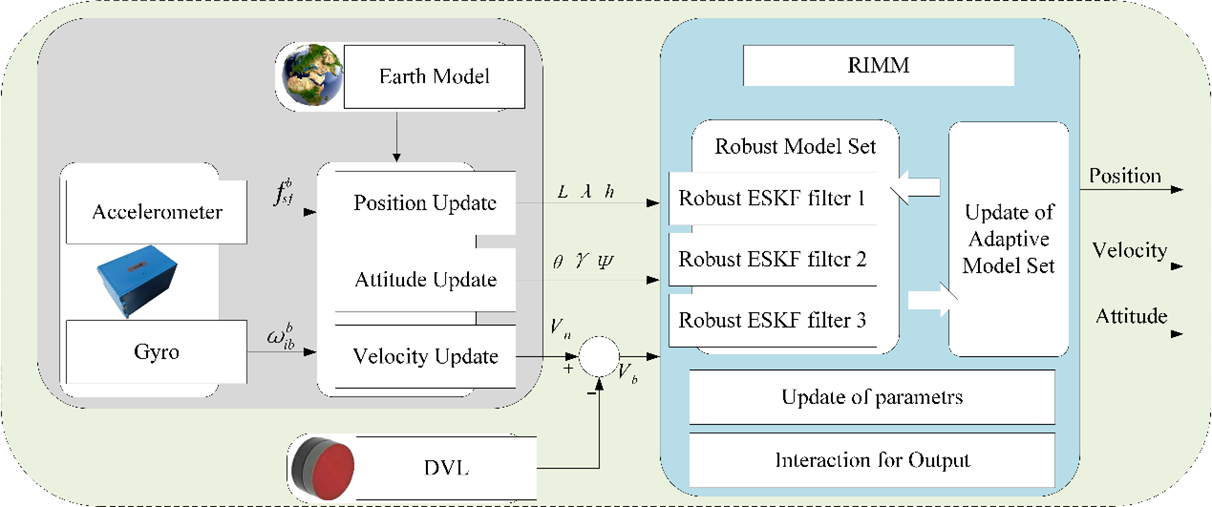
本文提出了一种基于交互式多模型的鲁棒式组合导航系统。首先,为ESKF滤波算法引入鲁棒式核函数,构建鲁棒滤波器,抵抗离群值干扰;其次,基于自适应模型更新策略对模型集进行更新,减少模型集数量,提高运算速度,同时基于多个模型的概率进行自适应混合加权。
本文主要贡献如下:
1)提出了一种结合改进Huber核函数的误差状态卡尔曼滤波器,在对非线性随机动态系统进行线性化的同时,能较好的抵抗离群值干扰;
2)提出了一种新的基于IMM的鲁棒自适应模型集更新策略,利用高斯假设近似非高斯厚尾噪声分布,提高了组合导航系统的环境适用性。
论文作者:秦晓辉、张润邦、王广才、龙承启、胡满江
论文链接:https://ieeexplore.ieee.org/abstract/document/10064269


