近日,智能车辆团队论文《Self-triggered distributed model predictive control for cooperative diving of multi-AUV system》在Ocean Engineering上发表。
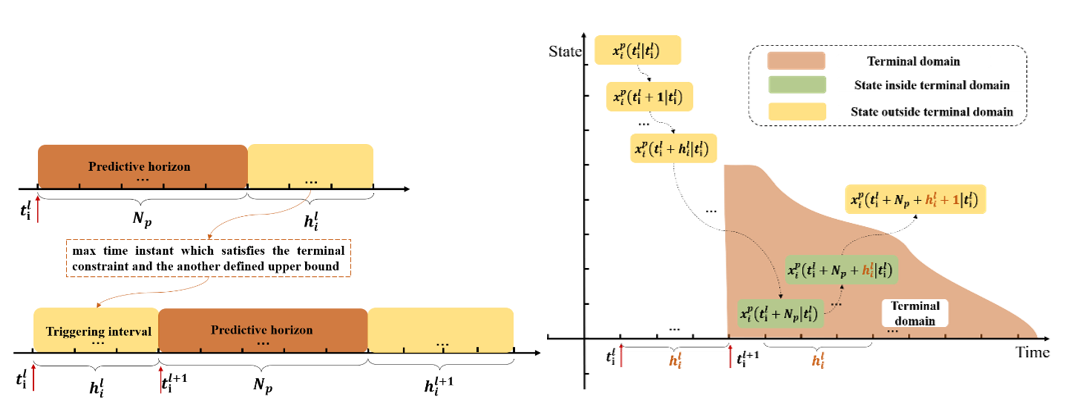
本文提出了一种多AUV系统自触发分布式模型预测控制算法。首先,基于不等式终端约束设计了多AUV协同下潜DMPC控制器。其次,构建了自触发机制以减少计算优化问题和通信的次数。
本文主要贡献如下:
1)设计了基于终端不等式约束的DMPC控制器,相较于终端等式约束,扩大了求解可行域;
2)设计了自触发机制,当终端能够保持在终端域内时,减少计算优化问题和通信次数,提升效率。
论文作者:边有钢、张俊杰、胡满江、杜长坤、崔庆佳、丁荣军
论文链接:https://www.sciencedirect.com/science/article/pii/S0029801822025458


