智能车辆团队论文《Distributed Coordinated Brake Control for Longitudinal Collision Avoidance of Multiple Connected Automated Vehicles》在IEEE Transactions on Intelligent Vehicles发表。
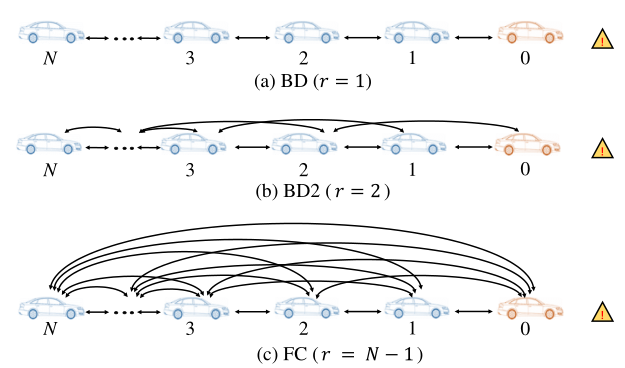
针对多车协同避撞的安全性问题,本文提出了一种面向多网联自动驾驶车辆纵向避撞的分布式协同制动控制方法。本文首先定义了多网联自动驾驶车辆纵向避撞的场景,在该场景下建立了双向跟随式、全连接式等通信拓扑模型,并建立了网联自动驾驶车辆的纵向动力学模型。为了更好地表征避撞过程中车辆质量和相对速度对安全性的影响,本文基于相对动能理论,以最小化系统的相对动能为控制目标设计了一个分布式优化问题,并设计了相应的分布式协同制动控制算法。
本文的主要贡献如下:
(1)在控制算法设计层面,本文设计了一种分布式协同制动控制算法。本文设计了一个基于二次规划的集中式优化问题,并将该优化问题分解为若干子问题,再引入分布式优化技术,对多网联自动驾驶车辆的减速行为进行分布式优化。与集中协同制动控制算法相比,本文消除了对中央单元的依赖,降低了对车间通信范围的要求。
(2)在系统性能分析层面,本文详细评估了所提出的控制算法的避撞性能。本文考虑了前车附着系数、初速度、初始车间距以及通信拓扑等因素的影响,并采用统计学方法对不同控制算法进行了比较。
最后,本文在不同道路类型、通信拓扑、初速度等12种场景下进行了仿真对比,分析了不同的场景因素对该方法性能的影响。此外,还定义了成功避撞次数以及停车距离方差的平均值作为性能评价指标,与集中协同制动控制、直接制动控制以及基于驾驶员反应的制动控制方法相比,本文所提出的方法在实际场景中有着更优良的避撞性能。
论文作者:胡满江、李俊妮、边有钢、王建强、徐彪、朱亚楠
DOI: 10.1109/TIV.2022.3197951
论文链接:https://ieeexplore.ieee.org/document/9854148


