智能车辆团队论文《Fuel Economy-Oriented Vehicle Platoon Control Using Economic Model Predictive Control》在IEEE Transactions on Intelligent Transportation Systems发表。
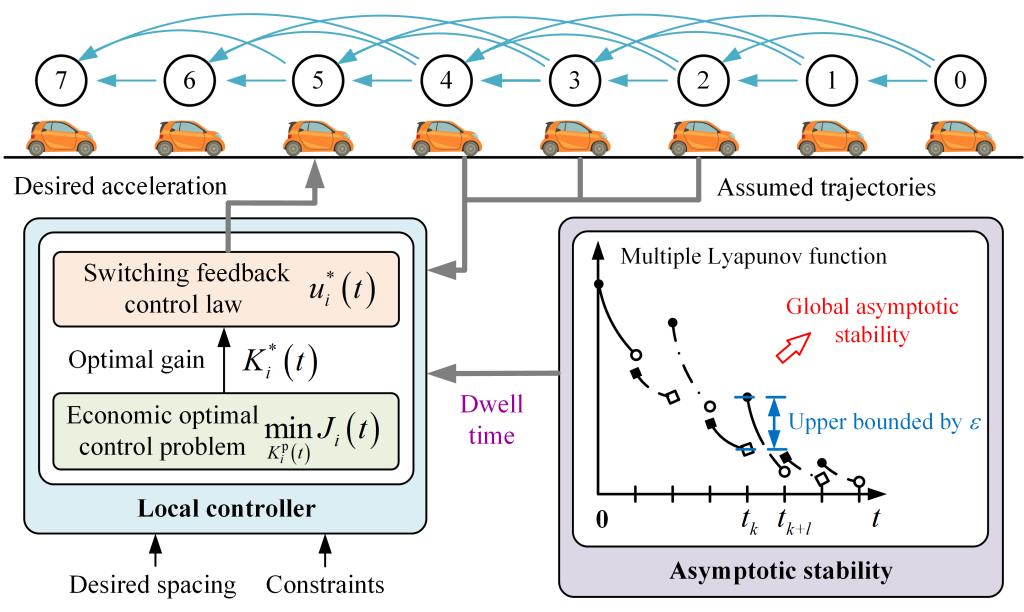
针对网联车辆队列的燃油经济性优化问题,本文结合切换反馈控制和经济模型预测控制(EMPC)理论,提出了一种分布式控制方法。本文首先建立了包含时变反馈增益的闭环车辆动力学模型,其中间距策略采用恒定时距(CTH)、通信拓扑采用多前车跟随(MPF)。为获得经济性最优的反馈增益,本文为每个跟随车辆设计了局部最优控制问题,并基于该问题设计了分布式EMPC算法,同时定义了平均驻留时间。基于线性矩阵不等式(LMIs)和李亚普诺夫方法,本文严格分析了保证误差系统渐近稳定的反馈增益选取方法和平均驻留时间下界,并改进了控制算法以满足队列稳定性。
本文主要贡献如下:
(1)在控制器设计方面,本文设计了以燃油经济性为目标的车辆队列分布式经济模型预测控制器。本文直接将车辆瞬时燃油消耗率作为代价函数,将时变反馈增益作为优化变量,实现了燃油经济性的显式优化。与在规划层进行能耗优化的研究相比,本文为在控制层进一步降低能耗提供了新的思路。其次,本文在同一个最优控制问题中处理能耗优化与轨迹跟踪,降低了优化变量维度,减轻了计算负担。另外,本文采用多前车跟随通信拓扑,无需领航车辆全局通信,降低了通信要求。
(2)在系统分析方面,本文分析了队列闭环误差系统的渐近稳定性和队列稳定性。本本文利用李亚普诺夫方法分析了保证闭环切换系统渐近稳定的平均驻留时间下界。不同于牺牲跟踪精度以提高经济性的方法,本方法适用于具有严格稳定性要求的场景。
在多种工况下进行了仿真验证,与只考虑轨迹跟踪的时不变反馈增益控制及分布式MPC方法相比,本方法在维持良好跟踪精度的同时,最高实现了6.84%的燃油消耗量降低。
论文作者:胡满江、李崇康、边有钢、张辉、秦兆博、徐彪
DOI: 10.1109/TITS.2022.3183090
论文链接:https://ieeexplore.ieee.org/document/9801548


