日前,课题组秦兆博老师指导的博士生陈亮撰写的论文《A Lateral and Longitudinal Dynamics Control Framework of Autonomous Vehicles based on Multi-parameter Joint Estimation》被IEEE Transactions on Vehicular Technology接收,并已在线发表(10.1109/TVT.2022.3163507)。
自动驾驶车辆横/纵向控制的主要功能是使车辆按照期望参考轨迹安全可靠地行驶,合理的车辆动力学模型和控制方法对车辆横/纵向控制至关重要。除此之外,精确的车辆状态与路面参数也是控制系统的关键输入。论文以智能网联车辆为研究对象,针对基于状态参数估计的自动驾驶车辆横/纵向动力学控制问题进行研究。
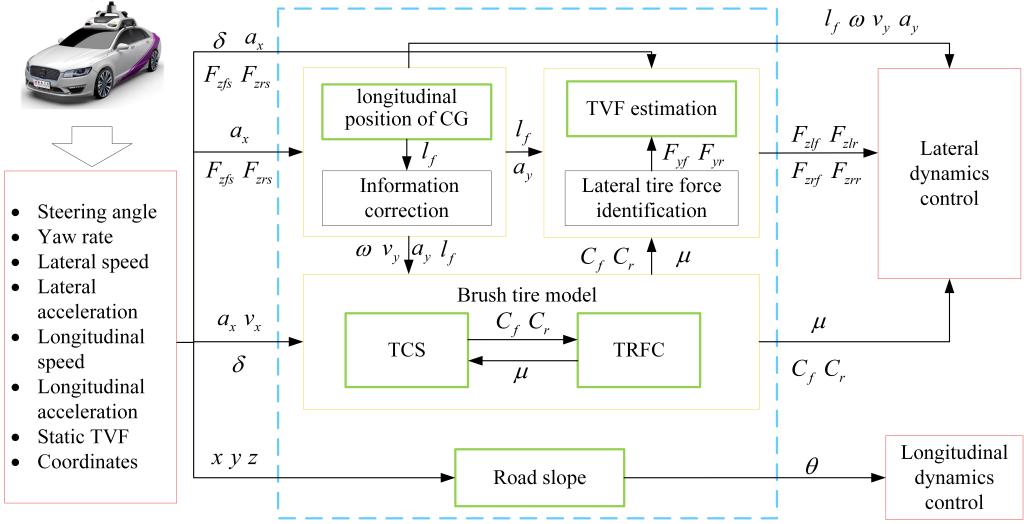
提出了一种基于自适应无迹卡尔曼滤波(AUKF)的多状态参数联合估计方法。采用一种派生的容错噪声统计特性估计器与无迹卡尔曼滤波(UKF),在只需自动驾驶车辆标配定位传感器的条件下,实现了对车辆质心位置、路面附着系数、轮胎侧偏刚度、轮胎垂向力以及路面坡度等状态参数的解耦并实现了多参数联合估计。仿真与实验结果表明,该方法可以给予横/纵向控制器精确的动力学参数输入。
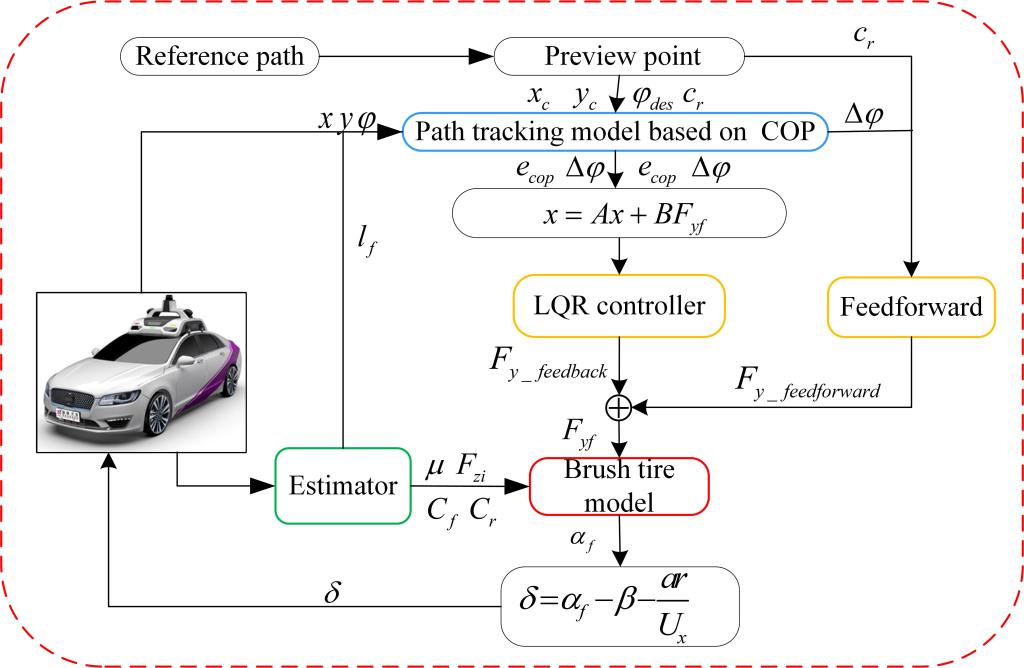
提出了一种基于最优前轮侧偏力的横向控制方法。针对大横向加速度工况下的路径跟踪问题,提出了一种基于最优前轮侧偏力的线性二次型调节器(LQR)横向控制方法。通过构建基于“前馈+反馈”的LQR控制器对前轮侧偏力进行在线求解。结合轮胎垂向力、侧偏刚度以及路面附着系数等状态参数估计,该方法在大横向加速度工况下可以降低路径跟踪误差并能有效提升车辆的操纵性与横向稳定性。
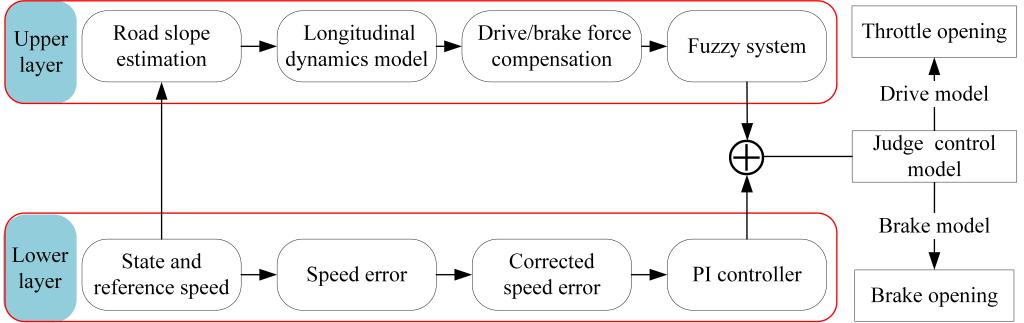
提出了一种基于期望驱/制动力补偿的纵向控制方法。为提高纵向控制器的精度与鲁棒性,采用双层控制结构,下层控制器采用基于速度反馈的比例积分(PI)控制方法对车辆底层的油门和制动踏板进行控制以达到在平坦路面上跟踪期望速度的目的。上层控制器采用基于模糊系统的期望驱/制动力补偿算法,将坡度的影响近似转化为车辆所需额外的期望驱/制动力,进而通过模糊系统将期望驱/制动力转化为油门踏板开度与制动踏板开度的补偿量,以实现在坡路工况下精确地纵向速度跟踪控制。
指导老师:秦兆博
论文作者列表:秦兆博、陈亮、胡满江、陈鑫
论文链接:https://ieeexplore.ieee.org/abstract/document/9745372


