智能车辆团队论文《Hierarchical Cooperative Control of Connected Vehicles: From Heterogeneous Parameters to Heterogeneous Structures》在IEEE/CAA Journal of Automatica Sinica发表。
在网联车辆队列协同控制中,车辆动力学异构性和通信拓扑多样性一直是研究的热点和难点问题。车辆动力学结构异质性和参数异质性与多型通信拓扑耦合,不能采用克罗内克积表示,也难以采用特征值分解、行列式变换等技术解耦分析;加之通信时延的影响,更加大了系统分析难度。为此,本文针对兼具参数异质和结构异质的车辆队列系统,考虑带有通信时延的一般通信拓扑形式,进行系统建模和协同控制。
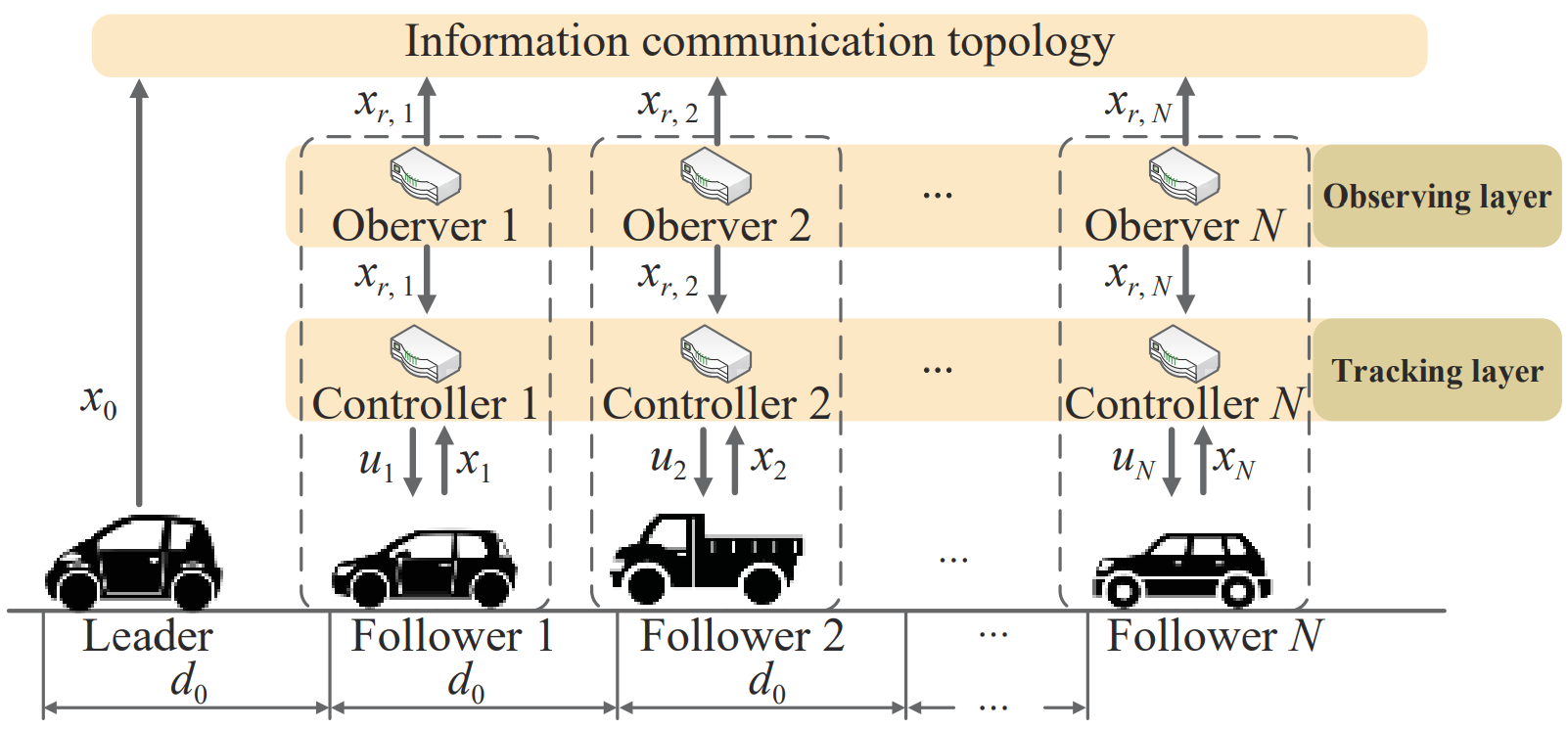
本文设计了上述分布式统一分层架构,即包括上层观测层和下层跟踪控制层。主要贡献如下:
在所提的框架中,上层观测器用于跟随车辆根据邻居车辆信息进行观测领航车的状态,而下层跟踪控制器用于跟驰车辆使用自车反馈控制进行跟踪领航车的观测值,这实现了邻居车辆交互信息与自车动力学控制的分离。然后,本文分析了无/有通信时延的系统闭环稳定性;进一步将观测器拓展为有限时间收敛观测器,分析了一般通信拓扑下的队列稳定性。通过数值仿真和实车试验,验证了所提方法的有效性。
论文作者列表:胡满江、卜令坤、边有钢、秦洪懋、孙宁、曹东璞、钟志华
论文链接:https://www.ieee-jas.net/en/article/id/b93782fe-3708-48f5-ba1a-632a2b4fcf28


