智能车辆团队博士研究生龙承启撰写的论文《Trajectory tracking control of ROVs considering external disturbances and measurement noises using ESKF-based MPC》被Ocean Engineering接收,并于2021年10月27日在线发表。
ROV(远程遥控机器人)广泛运用于海底勘探、海洋资源开采、海缆铺设及水下人工设施维护,可显著提高水下的操作安全性及效率。管道巡检作为ROV的一项重要任务,ROV需要具备良好的轨迹跟踪功能。然而,以洋流为代表的外部干扰及传感器测量噪声会对ROV的跟踪性能造成极大的影响。为此,本文提出了一种基于ESKF-MPC的ROV的轨迹跟踪方法,保证实际运用时的跟踪精度及鲁棒性。
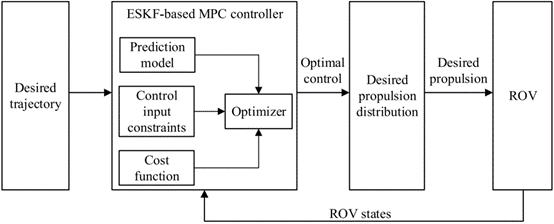
本文设计了上述控制框架,主要贡献如下:
1、洋流扰动以速度而不是力的形式引入动力学模型,这有助于避免难以测量洋流对ROV施加的力的问题。
2、ESKF用于估计系统状态及洋流干扰,有利于提高ROV对洋流干扰的鲁棒性。
3、推导了ESKF-MPC的离散时变非线性模型,引入了测量噪声,使得跟踪算法对测量噪声具有鲁棒性。
4、目标函数中充分考虑了推进力及力矩的实际约束,有利于减少对推进器的损害。
结果表明,本文提出的控制器有利于解决洋流干扰及测量噪声下的ROV轨迹跟踪问题。
论文作者列表:龙承启、秦晓辉、边有钢、胡满江
论文链接:https://doi.org/10.1016/j.oceaneng.2021.109991


