智能车辆团队合作撰写的论文《Cooperative Startup Control for Heterogeneous Vehicle Platoons: A Finite-time Output Tracking-Based Approach》被IEEE Transactions on Control of Network Systems接收,并已在线发表(DOI: 10.1109/TCNS.2021.3084463)。
在车辆队列控制(vehicle platoon control,VPC)任务中,特别是在启动过程,通常希望能够尽快跟踪期望目标,以提升路口瓶颈区交通效率。与目前采用较多的渐近控制方法相比,有限时间控制有更快的收敛速度、更高的控制精度和更好的鲁棒性。然而现有关于有限时间队列控制(finite-time platoon control,FTPC)的结论主要考虑车辆动力学为匀质,与实际不符。为此,本论文考虑异质动力学,研究了基于有限时间输出跟踪控制的车辆队列协同启动控制方法。
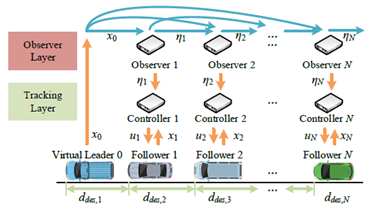
本文设计了上述分层VPC框架,提出了分布式有限时间启动控制协议,主要贡献如下:
1、将车辆队列建模为具有有界时变系统参数的一般线性异质多智能体系统,研究其有限时间输出控制问题,并分析了稳定性;
2、基于内模原理,建立了统一匀/异质分层控制框架,并引入势函数,建立了有限时间观测器;
3、研究基于有向图拓扑的VPC方法,拓展了可选拓扑范围。
协同启动控制仿真验证表明,本方法可有效提高交通效率。
论文链接:https://ieeexplore.ieee.org/document/9442951


