智能车辆团队论文《Behavioral Harmonization of a Cyclic Vehicular Platoon in a Closed Road Network》被IEEE Transactions on Intelligent Vehicles接收,并已在线发表(DOI:10.1109/TIV.2021.3062397)。
现有智能网联车辆的多车协同控制研究多集中在平直道路上的开环车辆队列系统,而实际交通路网则存在相互链接的交通路段,如何在这种路网条件下进行多车协同控制是值得探究的问题。为此,论文考虑最简单的环形路网,研究了环形队列的若干控制问题。
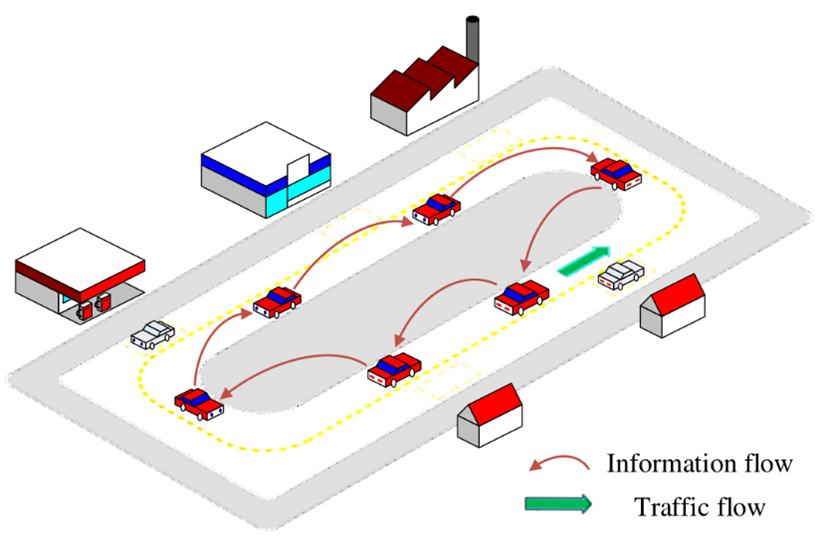
针对上述模型,本文建立了环形车辆队列系统模型,主要贡献如下:
1.针对匀质车辆模型,导出了充分必要的反馈增益稳定性区域,并通过放松约束条件,导出了与队列长度无关的稳定域;
2.基于频域分析,证明了上述稳定性区域可保证环形队列跟驰稳定性的要求;
3.在控制器中引入积分滑模控制方法,将匀质环形队列的理论结果推广到异质环形队列,推导了保证稳定性的反馈增益的充分条件;
4.对于异质环形队列,通过理论分析说明了几何队型对稳态行为的影响。
本文可为实际复杂路网下的多车协同控制提供一定的理论方法支撑。
论文作者列表:边有钢、李升波、徐彪、秦晓辉、李深、许庆、王建强、李克强
论文链接:https://ieeexplore.ieee.org/document/9364721


