2020年12月20日,团队秦兆博老师指导的硕士研究生陈亮撰写的论文《An Improved Real-Time Slip Model Identification Method for Autonomous Tracked Vehicles Using Forward Trajectory Prediction Compensation》被IEEE Transactions on Instrumentation and Measurement接收,并已在线发表(DOI:10.1109/TIM.2020.3048801)。
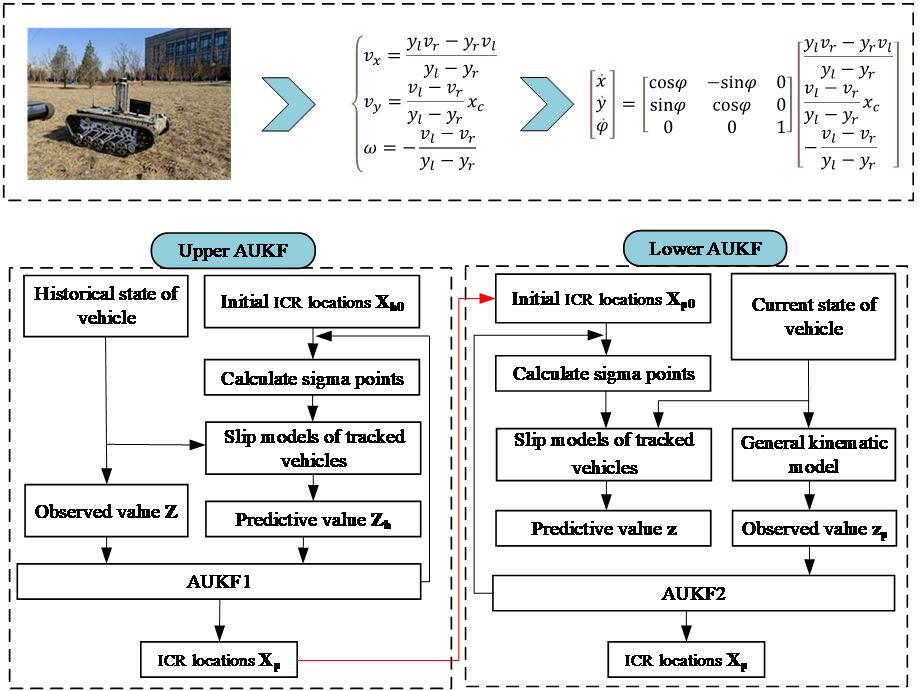
履带车辆在民用、军用等领域有着广泛的应用,但由于履带与地面之间的相互作用力复杂,为车辆建立精确的模型较为困难。该论文提出了一种基于轨迹预测补偿的双重自适应无迹卡尔曼滤波(DAUKF)方法对履带车辆滑动参数进行实时估计,为履带车路径跟踪控制以及路径规划提供精确的运动学模型参数。该方法利用前向轨迹预测对初步估计的滑动参数进行补偿,提高了滑动参数估计的精确性与鲁棒性。
利用电动履带车辆平台对该算法在大曲率和连续变化曲率场景下进行了进一步的实验验证。通过与EKF、UKF和AUKF的实验结果的比较,所提出的DAUKF算法在转弯工况下能大幅提升滑动参数估计的精度。这一研究工作在智能履带车辆的路径规划算法和路径跟踪控制算法中具有较好的应用前景。
指导老师:秦兆博
论文作者列表:秦兆博、陈亮、范晶晶、徐彪、胡满江、陈鑫
论文链接:https://ieeexplore.ieee.org/document/9314904


