2020年7月15日,团队秦兆博老师指导的硕士研究生陈鑫撰写的论文《A novel path planning methodology for automated valet parking based on directional graph search and geometry curve》被Robotics and Autonomous Systems接收,并已在线发表(DOI:10.1016/j.robot.2020.103606)。
自主泊车系统能有效降低泊车事故的发生率,并节省用户的时间,提高整个社会的运行效率。由于停车场的环境较为复杂,且车位空间狭窄,导致自主场景下的路径规划任务往往比较困难。该论文提出了一种基于定向图搜索及几何曲线的路径规划方法,引导车辆完成自主泊车任务。该方法通过跳点法为混合A*搜索提供方向引导,并结合几何曲线规划泊车路径,能够有效提升全局路径规划的效率,并解决全局路径规划与泊车路径规划之间的过渡难题。
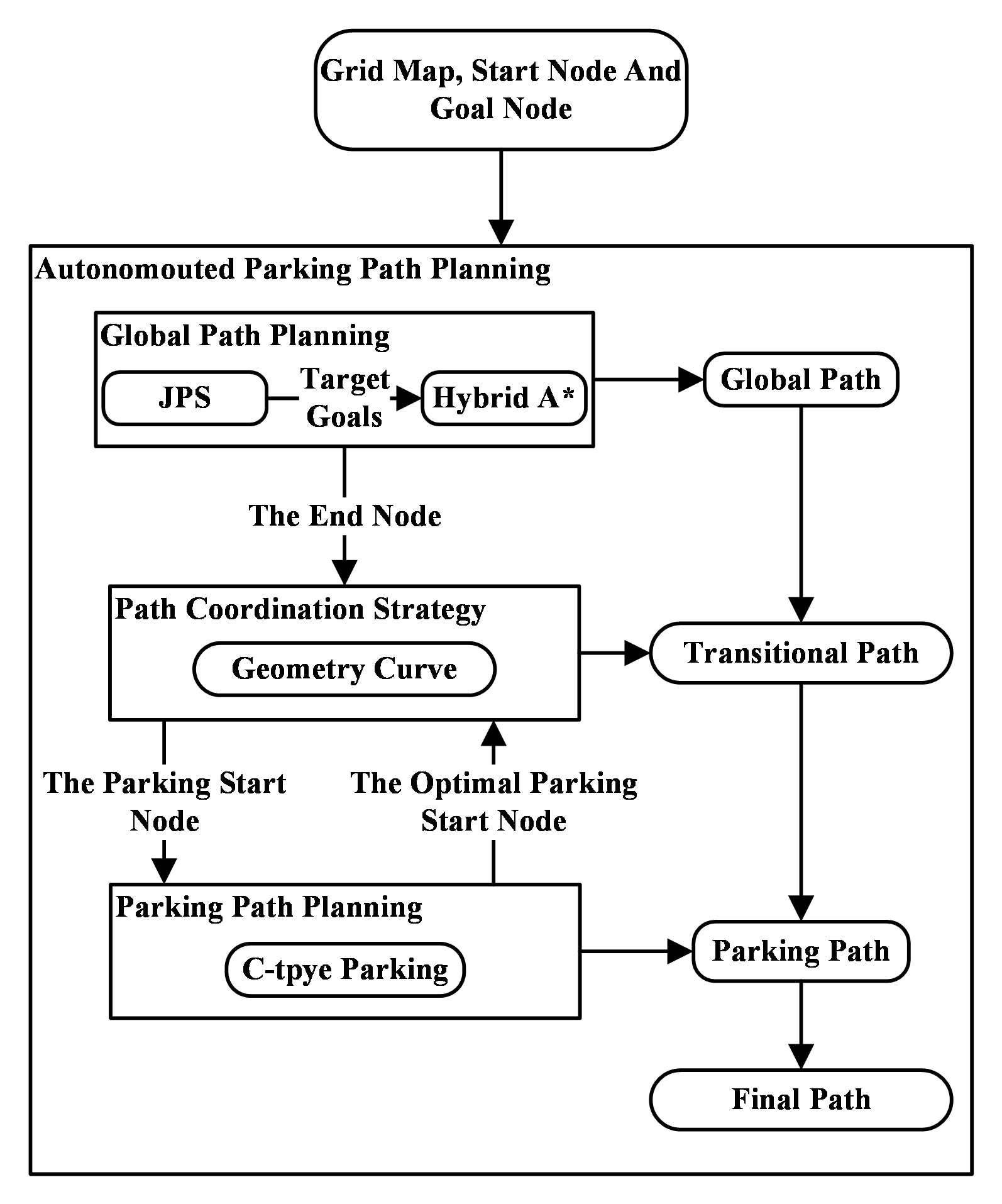
通过matlab与Prescan的联合仿真,对该算法在停车场场景下的规划效果进行了进一步的验证。实验结果表明,规划出的泊车路径具有充分的安全性。与传统混合A*的实验结果相比较,所提出的改进混合A*方法能更高效地完成任务。这一研究对自主泊车系统路径规划领域有着重要的参考意义。
指导老师:秦兆博
论文作者列表:秦兆博、陈鑫、胡满江、陈亮、范晶晶
论文链接https://www.sciencedirect.com/science/article/abs/pii/S0921889020304462


