
姓名:王广才
职称:副研究员
研究方向:水下机器人、无人车、无人机;惯性及组合导航技术;高精度定位与姿态测量技术
教育背景
2017.03~2021.06 东南大学 仪器科学与工程学院 博士
2021.07~2023.07 湖南大学 机械与运载工程学院 博士后
2023.07~至今 湖南大学 机械与运载工程学院 助理研究员,副研究员
科研项目
2021.07~2023.7,省优秀博士后创新人才,湖南省科技厅2020年湖南创新型省份建设专项,主持.
2022.11~2023.07,水声通信时延下多 AUV 主从式协同定位方法研究,博士后面上基金,主持。
2023.07~2025.07,水声通信时延下 UUV 集群分布式协同导航信息融合方法,无锡市科技攻关项目,主持。
2017.01~2020.12,XX用光纤陀螺惯性制导系统技术,“十三五”装备预研共用技术项目,参与。
2023.12~2024.12,面向XX的水下无人系统智能控制技术,国防科工局基础科研项目,参与。
2021.01~2023.12,深海矿产资源开采关键装备技术研究与示范应用,湖南省科技重大专项,参与。
2023.01~2025.12,深海矿产资源开采理论方法与核心技术研究,湖南省科技重大基金,参与。
奖励与荣誉
中国仪器仪表学会科技进步二等奖
中国商业联合会科技进步二等奖
2019年IEEE国际会议最佳论文奖
发表论文
Wang Guangcai; Xu Xiaosu; Wang Jian; Zhu Yongyun ; An Enhanced INS/GNSS Tightly Coupled Navigation System Using Time-Differenced Carrier Phase Measurement, IEEE Transactions on Instrumentation and Measurement, 2020.(SCI,第一作者)
Wang Guangcai; Xu Xiaosu; Zhang Tao ; M-M Estimation-Based Robust Cubature Kalman Filter for INS/GPS Integrated Navigation System, IEEE Transactions on Instrumentation and Measurement, 2020.(SCI,第一作者)
Wang Guangcai, Xu Xiaosu and Yao Yiqing, "M-M Estimation Based Robust Cubature Kalman Filter for INS/GPS Integrated Navigation System. Mathematical Problems in Engineering, 2020.(SCI,第一作者)
Wang Guangcai, X. Xu, Y. Yao and J. Tong. A Novel BPNN-Based Method to Overcome the GPS Outages for INS/GPS System. IEEE Access, 2019. (SCI,第一作者)
Wang Guangcai, Xu Xiaosu, Wang Jian, Variational Bayesian Adaptive Embedded Cubature Kal man Filter Algorithm for Initial Alignment of SINS with Uncertain Observations, 2019 The 7th International Conference on Control, Mechatronics and Automation, TU Delft.(EI,第一作者)
Bian Yougang, Li Ruotian, Wang Guangcai*, Qin Xiaohui, Hu Manjiang, and Ding Rongjun, Tightly-coupled Information Fusion for SINS/DVL/USBL Integrated Navigation of UUV,Ocean Engineering, 2023.(SCI,通讯作者)
Hongmao Qin; Ying Wang; Guangcai Wang*; Xiaohui Qin; Yougang Bian ; GSCV-XGBoost based information reconstruction and fusion method for SINS/DVL integrated navigation system, Measurement Science and Technology, 2022.(SCI,通讯作者)
Hongmao Qin; Xi Wang; Guangcai Wang*; Manjiang Hu; Yougang Bian; Xiaohui Qin; Rongjun Ding; A novel INS/USBL/DVL integrated navigation scheme against complex underwater environment, Ocean Engineering, 2023.(SCI,通讯作者)
Xiaohui Qin; Runbang Zhang; Guangcai Wang*; Chengqi Long; Manjiang Hu ; Robust Interactive Multimodel INS/DVL Intergrated Navigation System With Adaptive Model Set, IEEE Sensors Journal, 2023.(SCI,通讯作者)
王鼎杰,王广才,吴杰.微惯性/卫星组合导航高精度事后基准确定方法.中国惯性技术学报,2017.(EI)
王 迪,王 冰,黄浩乾,王广才,刘锡祥. 复杂水下环境中自适应粒子群优化的 SINS/DVL组合导航方法.中国惯性技术学报,2023. (EI)
发明专利
王广才,崔庆佳,徐彪,等. 声学多普勒测速仪误差估计方法、装置及系统. (专利号:ZL 2022 1 0056534.0)
王广才,崔庆佳,胡满江,等. 一种超短基线水声测距方法及系统. (专利号:ZL 2022 1 0055207.3)
王广才,崔庆佳,秦晓辉,等.一种导航信息处理器及其方法.(ZL 2022 1 0443553.9)
王广才,许嘉烨,秦晓辉,等.水下无人航行器的协同导航方法、装置及系统.(ZL 2024 1 0027822.2)
秦洪懋,彭纳武,王广才,等.一种抗差联邦卡尔曼滤波方法、设备与系统.(ZL 2022 1 0345007.1)
秦洪懋,汪颖,王广才,等.一种SINS和DVL组合导航方法、设备与系统.(ZL 2022 1 0097440.8)
秦洪懋,岳昊,王广才,等.一种基于牛顿迭代法的DVL误差标定方法及系统.(ZL 2022 1 0089031.3)
崔庆佳,马志远,王广才,等.水下机器人自适应通信方法、装置及系统.(ZL202410161116.7)
边有钢,李若天,张润邦,王广才,等.一种DVL安装误差标定方法、设备及系统.(ZL 2022 1 0202064.4)
产业成果
(一)F45型光纤捷联惯性导航系统
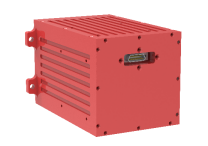
尺寸:82 ×82 ×130mm
重量:<1.5kg
F45型光纤捷联惯导可根据信息可用性自主融合GNSS、DVL、USBL等传感器数据,并完成传感器误差在线标定。产品采用的先进无缝导航技术,充分解决了导航系统在水下与水面之间切换传感器融合类型时的状态波动问题,保障导航状态全过程稳定、平滑。
定姿误差:航向<0.7°sec(L) 水平<0.05°
定位误差: <0.7%航程(DVL辅助);3倍优于GNSS、USBL定位精度(GNSS、USBL辅助)
技术成熟度:TRL9,目前已应用于国内多款国防类和巡检类水下机器人。
水下潜器导航、船用罗经、陆地车辆位姿基准
(二)MINS型微惯性组合导航系统

尺寸:103×108×40mm
重量:<0.5kg
MINS是一款能够提供多种导航参数的组合导航产品,其内置高精度 MEMS 陀螺仪与加速度计,支持外接GNSS、里程计信息辅助,具有高精度、体积小、全天候、应用广泛等优点,其借助先进多传感器数据融合技术,有效保障系统在高动态、大机动和恶劣卫星观测条件下的可靠性、精确性和动态性,实时提供高精度的载体位置、姿态、速度等信息,是无人车、无人机等智能体导航的理想解决方案。
定姿误差:航向<0.1°/2m基线 水平<0.1°
定速误差:0.02m/s
定位误差:<1.5m(GPS单点定位辅助) <1cm(GPS RTK辅助)
技术成熟度:TRL9
无人车、无人船、无人机、精密农业、智慧港口等


